Математическое моделирование и расчет систем управления техническими объектами
ЛСДК; ЛСДК; ЛСДК; ЛСДК.
Операторы четвертого уровня сложности – ЛСДК – нелинейные нестационарные стохастичные бесконечномерные. Им соответствуют нелинейные дифференциальные уравнения в частных производных с переменными случайными параметрами.
Для систем, описываемых операторами второго и выше уровней сложности, имеется, как правило, только единственная возможность их анализа и синтеза п
утем вычислительных экспериментов.
Если модель системы образована элементами различных классов, то класс системы определяется классом элемента с максимальным числом отрицаний.
Система называется автономной, если на нее не действуют внешние силы, в том числе параметрического типа. Автономные системы, таким образом, стационарны. Изменение их состояния происходит в силу накопленной ранее энергии. На рис.2 модель среды представлена в виде автономной системы, имеющей выходы, но не имеющей входов. Движения автономной системы называют свободными.
Дифференциальные уравнения автономных систем включают переменные системы и их производные, но не содержат переменных, описывающих воздействия среды, и имеют постоянные параметры. Это так называемые однородные дифференциальные уравнения
| ||||||||||||||||||||||||||||||||||
![]() ,
,
дополняемые начальными условиями ![]()
Начальные условия являются следствием предыстории системы и вместе с дифференциальными уравнениями полностью определяют поведение автономной системы. В случае автономных систем с дискретным временем будем иметь однородные разностные уравнения:
![]() .
.
Среда на входе системы моделируется автономными системами – генераторами воздействий или преобразователями типовых воздействий – фильтрами. Распространенными типовыми сигналами, моделирующими детерминированное воздействие, являются единичные импульсная и ступенчатая функции. Примером типового случайного воздействия является так называемый «белый шум». Среда может моделироваться динамической системой того же класса, что и сама система управления. Однако часто рассматриваются детерминированные системы со случайными воздействиями на входе.
1.3. Способы построения моделей
В зависимости от характера и объема априорной информации об объекте исследования выделяют два способа построения моделей систем управления в формах, принятых в теории управления: аналитический и экспериментальный.
Аналитический способ применяется для построения моделей объектов хорошо изученной природы. В этом случае имеется вся необходимая информация о свойствах объекта, но она представлена в другой форме. В результате идеализации физических объектов появляются структурные модели в виде схем с сосредоточенными компонентами (рис.2, а). Типичными представителями физических систем, допускающих такое представление, являются электрические и механические объекты. На рис.2, б изображена электрическая схема; рис.2, в представляет собой пример механической поступательной системы.
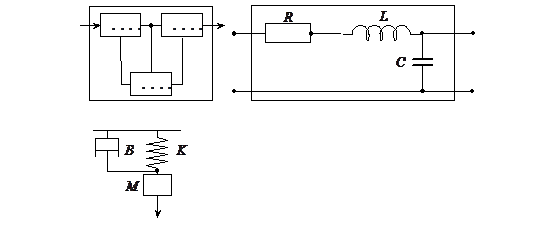 |
Подобные схемы являются моделями, в которых информация об интересующих свойствах объекта представлена в наглядной форме с использованием графических образов, отражающих физическую природу явлений, устройство и параметры объектов. На таких моделях базируются соответствующие дисциплины, например, теоретическая электротехника и теоретическая механика. Принципиальные схемы – стационарные линейные модели с сосредоточенными компонентами.
Методы теории управления абстрагируются от конкретной природы объектов и оперируют более общими – математическими (символьными) моделями.
Аналитический способ моделирования складывается из этапа построения схемы объекта и ее дальнейшего преобразования в математическое описание требуемой формы. При этом принципиальные проблемы моделирования решаются на первом – неформальном этапе. Второй этап оказывается процедурой преобразования форм представления моделей. Это дает возможность разработать различные компьютерные программы, позволяющие автоматизировать составление уравнений по схемам.
Рассмотрим примеры составления дифференциальных уравнений электрического и механического объектов. Ограничимся классом линейных стационарных моделей.
Существуют три типа пассивных электрических двухполюсников – сопротивление R, емкость С и индуктивность L, описываемые следующими уравнениями для токов i(t) и напряжений u(t):
![]()
![]() ;
;
![]()
Активными двухполюсниками электрических схем являются источник напряжения и источник тока.
Уравнения связи двухполюсников в конкретной схеме выражаются законами Кирхгофа, представляющими собой условия непрерывности токов и равновесия напряжений:
· первый закон – сумма токов в любом узле равна нулю;
· второй закон – сумма напряжений в любом контуре равна нулю.
Рассмотрим пример электрической схемы, изображенной на рис.2, б. Пусть выходом схемы является напряжение на емкости ![]() . В соответствии с первым законом имеем:
. В соответствии с первым законом имеем:
![]() .
.
Второй закон для единственного контура запишется так:
![]() .
.
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах