Математическое моделирование и расчет систем управления техническими объектами
Преобразуем уравнения (27) по Лапласу при нулевых начальных условиях:
sn(s) = AV(s) + BF(s);
(28)
Y(s) = Cn(s) + dF(s).
Выразим решение системы алгебраических уравнений – изображение вектора состояний – в следующей форме:
n(s) = (sI – A)-1BF(s), (29)
где (sI – A)-1 – матрица, обратная характеристической матрице (sI – A) матрицы А; I – единичная матрица. Подставим
(28) в (29) и получим
Y(s) = W(s)F(s) = [C(sI – A)-1B + d]F(s).
Передаточная функция W может быть записана и иначе, если учесть, что
(sI – A)-1 = (sI – A)* / A(s), (30)
где (sI – A)* – присоединенная матрица;
A(s) = det(sI – A), (31)
A(s) – определитель характеристической матрицы – характеристический полином системы дифференциальных уравнений (17).
С учетом (30) передаточная функция запишется как
![]() (32)
(32)
Элементами присоединенной матрицы (sI – A)* являются алгебраические дополнения элементов характеристической матрицы (sI – A), т.е. полиномы. Их степени не могут превосходить n – 1. Таким образом, как видно из формулы (32), степень m = degB полинома числителя передаточной функции W не может быть выше степени n = degA характеристического полинома и равна ей только при ![]() . Это ограничивает возможности описания динамических систем в нормальной форме пространства состояний
. Это ограничивает возможности описания динамических систем в нормальной форме пространства состояний ![]() .
.
Имея полиномы передаточной функции (32), легко записать дифференциальное уравнение n-го порядка.
Преобразуем по Лапласу уравнения (27)
sn(s) – n(0) = An(s) + BF(s)
и получим выражение для изображения вектора состояния
n(s) = (sI – A)-1n(0) + (sI – A)-1 BF(s). (33)
В этой сумме первое слагаемое – свободное, а второе – вынужденное движения системы. Для получения оригинала – функции времени n(t) выполняется операция обратного преобразования Лапласа. В данном случае выражение для изображения представляет собой матрицу, однако справедлива аналогия со скалярным случаем. Оригинал скалярной функции
![]()
![]()
имеет вид экспоненты. Оказывается, что аналогичное выражение имеет место и в матричном случае, т.е.
L-1 {(sI – A)-1} = eAt = Ф(t),
что является матричной экспонентой, называемой матрицей перехода. Произведению изображений отвечает свертка оригиналов, это справедливо и для матриц. Поэтому вектор состояния как функция времени получается из выражения (33) и имеет следующий вид:
![]() (34)
(34)
Изображение переменной выхода при нулевых начальных условиях n(0) = 0 получится подстановкой второго слагаемого выражения (33) во второе уравнение системы (27):
![]()
Если на вход системы подается единичный импульс, т.е. F(s) = 1, то реакция системы (импульсная переходная функция) определяется из выражения (34):
![]() (35)
(35)
Сопоставляя полученную формулу с выражением для передаточной функции (32), замечаем, что
![]() .
.
Отсюда следует один из способов получения матрицы перехода путем обращения по Лапласу матрицы (sI – A)-1.
2.6 Модели систем управления с раскрытой причинно-следственной структурой
Под структурой систем управления понимают причинно-следственную связь между элементами направленного действия. Понятия «система» и «структура» являются близкими по смыслу. Наиболее общие определения понятий системы и структуры строятся как отношения на множествах, математически это графы. Графы являются универсальным средством описания структур систем. При небольшом числе элементов и связей весьма наглядны диаграммы графов, т.е. их геометрические образы.
В зависимости от элементов множеств рассматриваются различные типы графов. Приведенная на рис.3, а схема, иллюстрирующая принципы управления, отражает типовые структуры причинно-следственных отношений основных элементов систем управления и, по существу, представляет собой ориентированный граф. Электрическая и механическая схемы, изображенные на рис.2, также являются примерами графов, только неориентированных.
Имея в виду структуру связей элементов, иногда говорят о топологии (топографии) системы. Даже без конкретизации вершин и дуг, т.е. только по топологии, можно сделать ряд важнейших выводов о свойствах системы, которые сохраняются при дальнейшем раскрытии неопределенности – уточнении структур операторов и конкретизации значений параметров.
В зависимости от подхода к моделированию и от конкретного содержания элементов исходного множества и элементов отношения модели с раскрытой структурой могут быть представлены структурными схемами, сигнальными графами, системами дифференциальных уравнений в причинно-следственной форме и некоторыми другими формами.
Структурная схема (C-граф) представляет собой причинно-следственную связь звеньев. Линейное звено (рис.7, а) в общем случае имеет любое число входов; оно преобразует сумму входов в единственную переменную выхода по некоторому оператору Wi (рис.7, б):
![]()
В частном случае оператора тождественного преобразования звено выступает как сумматор.
Структурная схема является ориентированным графом и состоит из множества вершин W = {W1, …, WN} и множества дуг Х = {(Wi, Wj)} – упорядоченных пар вершин. Дугам графа соответствуют переменные xi; i = 1, ., N, а вершинам – звенья. Для того, чтобы отличать рассматриваемый граф от сигнальных графов других типов, назовем его С-графом. На языке теории бинарных отношений С-граф определяется как пара множеств:
С = < W,X >,
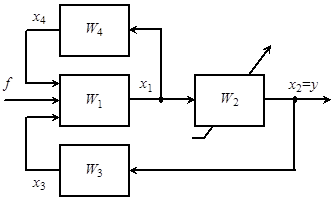
Рис.8. Структурная схема (С-граф)
а структурная схема (геометрический образ) называется также диаграммой графа (рис.8). Вершина С-графа – звено общего вида, по определению суммирует переменные заходящих дуг. Это позволяет отказаться от специального элемента суммирования, что отличает С-графы от классических структурных схем.
Дуга С-графа – элемент (Wi, Wj) отношения Х задает причинно-следственную связь между двумя звеньями, причем выход j-го звена является входом i-го. Дуге (Wi, Wj) соответствует переменная xj.
Теоретико-множественное описание систем дает естественный способ ввода и редактирования моделей систем управления как последовательного раскрытия неопределенности. Для этого модели упорядочиваются по рангам неопределенности R = 0, 1, 2, 3.
Множество W звеньев задает модель нулевого ранга Ms(0). Для примера С-графа, диаграмма которого изображена на рис.8, множество перечисляется так:
W = {W1, W2, W3, W4}.
В случае однотипных звеньев можно ограничиться заданием числа вершин графа (звеньев), т.е. мощности множества ![]() .
.
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах