Математическое моделирование и расчет систем управления техническими объектами
Дополнение модели Ms(0) множеством Х дает модель первого ранга Мs(1) – это топология (топография) системы. Для С-графа, изображенного на рис.8, множество перечисляется так: Х = {(1,3), (1,4), (2,1), (3,2), (4,1)}. В перечислении приведены только индексы (номера) звеньев.
Дальнейшее раскрытие неопределенности достигается при задании структур операторов вершин. Для рассматриваемого класса сис
тем передаточные функции являются отношениями полиномов: Wi(s) = Bi(s) / Ai(s). Задание их структур сводится к указанию степеней mi и ni полиномов Bi и Ai. Когда для всех звеньев заданы структуры операторов, образуется модель системы структурного ранга Мs (2).
Пусть для рассматриваемого примера системы передаточные функции звеньев имеют вид W1(s) = k1; W2(s) = k2 / (1 + T2s)2; W3(s) = -1; W4(s) = -t4s / (1 + T4s). Информацию о структурах операторов можно закодировать массивами степеней полиномов числителей и знаменателей передаточных функций: {0,0,0,1} и {0,2,0,1}.
Результатом конкретизации значений всех коэффициентов полиномов является полностью определенная модель третьего, параметрического ранга Мs (3).
Ранее изложено описание собственно системы (автономной системы). Для описания связей системы со средой следует указать звено, на вход которого подается воздействие, и звено, выход которого является выходом системы. На примере С-графа (рис.8) номер входного звена r = 1, а выходного q = 2. В результате оказывается определенной модель системы со связями со средой Mysf (3). При изучении влияния вариаций звеньев на характеристики системы указывается варьируемое звено. На рис.8 им является звено W2.
Сигнальный граф (граф Мэзона) является одной из удобных в теории и расчетной практике форм представления моделей систем управления.
Модель системы в форме сигнального графа определяется как бинарное отношение W на множестве переменных Х = {x1, …, xN}: G = < X,W >
Элементам отношения W = {(xi xj)} ставятся в соответствие операторы преобразования переменных. На диаграммах сигнальных графов переменным отвечают вершины, где суммируются сигналы заходящих дуг, а элементам отношения – дуги. Способы задания моделей различных рангов в форме сигнальных графов те же, что и для С-графов.
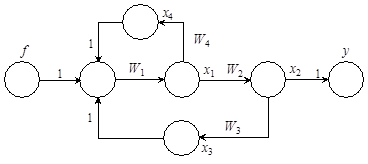
Рис.9. Диаграмма сигнального графа
На рис.9 изображена диаграмма сигнального графа – модель топологического ранга, несущая ту же информацию о системе, что и структурная схема (рис.8). Необходимо подчеркнуть, что формы представления моделей и способы их отображения могут быть различными – символьными или алгебраическими (уравнения, матрицы), геометрическими или топологическими (диаграммы графов). Информация о моделях различных рангов R последовательно раскрывается описанием множеств, задающих: состав элементов R = 0; топологию причинно-следственных связей между ними R = 1; структуры операторов R = 2; параметры R = 3.
Теоретико-множественное представление структур систем в форме графов обеспечивает формализацию описания моделей, упрощает кодирование их графических образов, а также разработку алгоритмов анализа систем.
2.7 Типовые звенья автоматических систем управления
При исследовании САУ ее разбивают на простые звенья. В результате этого математическое описание каждого звена может быть составлено без учета связей его с другими звеньями, а описание всей САУ получено как совокупность уравнений отдельных звеньев.
Уравнение усилительного звена имеет вид:
y = Kx. (36)
Передаточная функция в этом случае:
W(p) = K. (37)
Амплитудно-фазовая характеристика:
W(jw) = K. (38)
Примером усилительного звена является рычаг. Уравнение рычага имеет вид
![]()
Уравнение апериодического звена имеет вид:
![]() . (39)
. (39)
Передаточная функция:
![]() (40)
(40)
Амплитудно-фазовая характеристика:
![]() (41)
(41)
АФЧХ представляет собой полуокружность с радиусом K/2 и центром в точке (K/2, j*0) на действительной оси (рис.10).
Логарифмическая амплитудная частотная характеристика
![]() (42)
(42)
При малых значениях w << 1/Т
![]() (43)
(43)
На больших частотах, когда w >> 1/T
![]() . (44)
. (44)
В соответствии с выражениями (43) и (44) на рис.10, б приведена ЛАЧХ апериодического звена. Примером апериодического звена является рассмотренная ранее емкость.
Уравнение колебательного звена:
![]() (45)
(45)
|
причем Т1 и Т2 связаны условием
![]() (46)
(46)
Это условие означает, что корни характеристического уравнения вида
![]() (47)
(47)
соответствуют дифференциальному уравнению (45), являются комплексными. Передаточная функция, соответствующая уравнению (45), имеет вид
![]() (48)
(48)
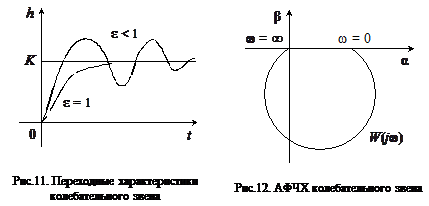
Переходная функция, являющаяся решением уравнения (45) при х = l(t), приведена на рис.11.
Амплитудно-фазовая характеристика звена (рис.12):
![]() . (49)
. (49)
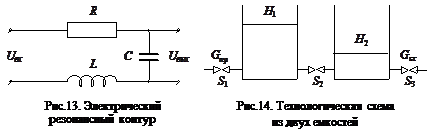
Примером колебательного звена являются электрический резонансный контур (рис.13)и двухъемкостная схема (рис.14).
Если в уравнении (45) выполняется условие
![]() , (50)
, (50)
то характеристическое уравнение (47) имеет отрицательные действительные корни. В этом случае звено называется апериодическим звеном второго порядка. Все рассмотренные выше звенья называются статическими.
Уравнение интегрирующего звена:
![]() (51)
(51)
или в интегральной форме:
![]() (52)
(52)
|
Переходная функция интегрирующего звена имеет вид (рис.15, а):
![]() ; (53)
; (53)
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах