Математическое моделирование и расчет систем управления техническими объектами
Условия преобразования сигналов безынерционными НЭ зависят от уровней сигналов и не зависят от их частоты. Приведем некоторые примеры безынерционных НЭ и их СХ.
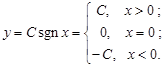
Рассмотрим нелинейные элементы с кусочно-постоянными СХ. Простейшим представителем нелинейностей этой группы является так называемое идеальное реле (рис.25, а):
Более тонкое изучение может показать, что релейное устройство имеет гистерезис (рис.25, б). Выражение для двузначной СХ с разрывами первого рода можно записать так:
|
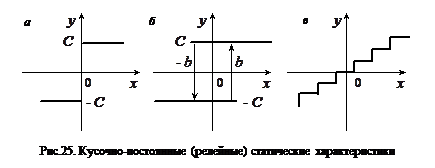
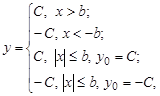
где b – половина зоны неоднозначности СХ; y0 – состояние реле, равное значению у до входа в зону неоднозначности. Таким образом, этот безынерционный НЭ обладает памятью: значение его выхода определяется не только значением входа в тот же момент, но также и предысторией (состоянием) НЭ по уровню сигнала.
Другим типом НЭ с кусочно-постоянной однозначной СХ является квантование сигналов по уровню в преобразователях аналог-код, предназначенных для ввода информации о состоянии непрерывных процессов в цифровые управляющие устройства (рис.25, в). Малая разрядность ЭВМ может оказаться существенным препятствием к достижению высокой точности и хорошего качества процессов в окрестности положений равновесия.
Теперь обратимся к нелинейным элементам с кусочно-линейными СХ. На рис.26, а показан график СХ НЭ типа «насыщение»:
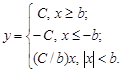
Как правило, эта нелинейность вводится в модели для учета ограничений уровней переменных при исследовании поведения систем управления в режимах больших отклонений от положения равновесия.
Нелинейный элемент типа «зона нечувствительности» (рис.26, б) учитывает реальные свойства датчиков, исполнительных механизмов и других устройств при малых входных сигналах.
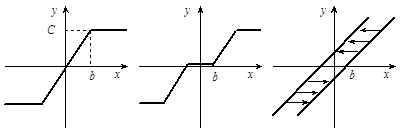
Нелинейность типа «люфт» (рис.26, в) является многозначной – одному значению входа соответствует бесчисленное множество (континуум) значений выхода. Этот НЭ моделирует кинематические сочленения механических приборов и устройств (например, редукторов).
Приведенные кусочно-линейные СХ непрерывны, но имеют разрыв производной dy/dx. Существуют и кусочно-линейные СХ с разрывами первого рода.
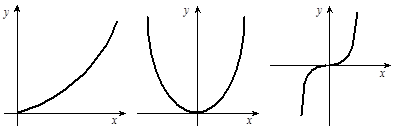
Рассмотрим нелинейные элементы с гладкими СХ. Гладкие СХ имеют непрерывные производные. Таковыми являются характеристики термопары (рис.27, а), устройства возведения входного сигнала в квадрат (рис.27, б), в куб (рис.27, в), индукционных электромеханических преобразователей угла, электромагнитных явлений с гистерезисом и др.
Нелинейные зависимости между значениями входа и выхода можно задавать параметрически – парой функций x(t), y(t); исключая параметр t, получим непосредственную связь между переменными входа и выхода. В случае однозначных СХ в качестве входа x(t) особенно удобен периодический сигнал треугольной формы с достаточной амплитудой, выход НЭ будет периодически повторять форму СХ. Для сложных НЭ с неоднозначными СХ выбор функции x(t) из условия исчерпывающего задания НЭ парой вход-выход является нетривиальной задачей. По существу, речь идет об экспериментальном исследовании НЭ, успех которого зависит от априорной информации.
3.2 Динамические нелинейные элементы
В общем случае дифференциальные уравнения, описывающие элементы систем или сами системы, являются нелинейными:
![]() (71)
(71)
Иногда они разрешаются относительно старшей производной переменной выхода:
![]() (72)
(72)
Примерами служат дифференциальные уравнения математического маятника ![]() и уравнение Ван дер Поля:
и уравнение Ван дер Поля:
![]()
Часто дифференциальные уравнения представляются в форме Коши:
 (73)
(73)
где n – вектор переменных состояния; j – вектор-функция; y – функция выхода. В уравнениях (71)-(73) предполагается, что нелинейные функции заданы аналитически.
Временная характеристика динамического линейного элемента – функция веса w(t) позволяет связывать переменные входа и выхода с помощью интеграла свертки. В линейных динамических элементах условия преобразования сигналов определялись лишь частотным спектром сигнала и не зависели от его уровня. Преобразование сигналов динамическими НЭ в значительной степени зависит как от уровней сигналов, так и от их частотных спектров.
3.3 Нелинейные модели с раскрытой структурой
| ||||||||||||||
Во многих случаях нелинейные модели появляются в результате дополнения линейных моделей нелинейными элементами, учитывающими такие естественные факторы, как ограниченность управляющих воздействий, наличие зоны нечувствительности в измерительных и исполнительных элементах, люфтов в кинематических сочленениях или искусственное введение нелинейностей в алгоритмы управления для получения свойств, недостижимых в линейных системах.
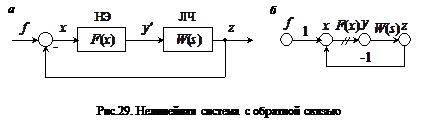
Простейший пример такой модели – нелинейный интегратор dy/dt = F(x) структурно изображается как последовательное соединение безынерционного НЭ и линейного интегрирующего звена (рис.28). На рис.29, а изображен другой пример – модель системы с обратной связью в форме структурной схемы, а на рис.29, б та же модель представлена в форме сигнального графа, одна из дуг которой помечена двумя штрихами, указывающими на нелинейный характер преобразования сигнала.
|
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах