Математическое моделирование и расчет систем управления техническими объектами
Временная характеристика системы с обратной связью wэ(t) сложным образом зависит от w1(t) и wэ(t), поэтому ее удобнее получать обратным преобразованием Лапласа эквивалентной передаточной функции:
wэ(t) =![]() .
.
Комплексная частотная характеристика системы с обратной связью также сложным образом зависит от частотных характеристик
звеньев:
Wэ(jw) = ![]() .
. ![]() (70)
(70)
Свойства системы с обратной связью определяются усилением разомкнутого контура с передаточной функцией Wp(s) = W1(s) + W2(s) на различных частотах. Если усиление контура мало, то можно пренебречь обратной связью. Действительно, по виду выражения (44) можно заключить, что на частотах, где выполняется условие
![]() =
= ![]() << 1
<< 1
имеет место приближенное соотношение
Wэ(jw) » W1(jw).
Практически усиление контура считается малым, если
Lр(w) = ![]() < – (16-20) дБ.
< – (16-20) дБ.
С другой стороны, на частотах, где выполняется условие
![]() >> 1,
>> 1,
имеет место другое приближенное соотношение
Wэ(jw) » ![]() .
.
Система в целом имеет частотную характеристику, близкую к обратной частотной характеристике звена обратной связи. Практически усиление велико, если Lр(w) > 16-20 дБ. На остальных частотах, где -16 дБ < LP(w) < 16 дБ, необходимо пользоваться точной формулой (70) или специальными номограммами замыкания.
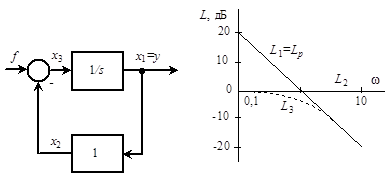
Рассмотрим пример системы, образованной интегрирующим звеном, охваченным единичной отрицательной обратной связью (рис.20, а). На рис.20, б изображены ЛАЧХ L1 и L2 этих звеньев. На частотах w < 0,1 с-1 усиление контура превышает 20 дБ.
Следовательно, амплитудно-частотная характеристика замкнутой системы на этих частотах определяется только свойствами звена обратной связи, т.е. замкнутая система на низких частотах с большой степенью приближения ведет себя как безынерционное звено с единичным усилением.
Напротив, на частотах w > 10 с-1 усиление контура ниже –20 дБ. Здесь контур практически разомкнут – замкнутая система ведет себя как интегрирующее звено,
|
|
На комплексной частоте нуля передаточной
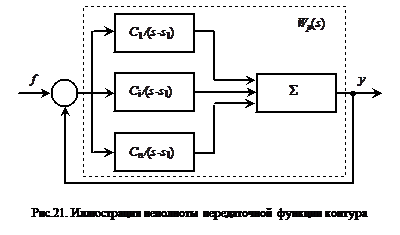
функции Wp усиление контура равно нулю, т.е. контур как бы разомкнут на соответствующей комплексной частоте. Если Wp имеет такой полюс, то в разложении Wp на сумму простейших дробей соответствующий коэффициент Сi равен нулю.
На рис.21 изображена структурная схема системы с единичной обратной связью, где звено в прямой цепи
W1(s) = Wp(s)![]()
представлено как параллельное соединение простейших звеньев.
2.9 Неопределенность моделей систем управления
|
|
Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в процессе эксплуатации. Если изменения характеристик происходят достаточно медленно по сравнению с длительностью процессов управления, то вместо нестационарных моделей (например, дифференциальных уравнений с переменными коэффициентами) можно рассматривать стационарные модели.
Модели систем управления строятся для строго оговоренных условий взаимодействия со средой, и их адекватность оригиналам определяется и характеристиками воздействий. Значения параметров, структура и класс операторов зависят от амплитуд изменения и частотного спектра сигналов.
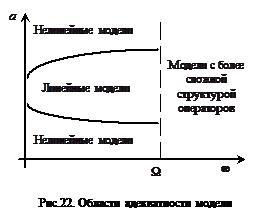
Линейные модели обычно строят для малых отклонений переменных от выбранных установившихся режимов. Если амплитуды сигналов превышают некоторое определенное значение А, то приходится строить нелинейные модели, как правило, учитывающие всевозможные ограничения в реальных элементах. Иногда область адекватности линейных моделей ограничивается малыми амплитудами а, для которых следует учитывать такие нелинейные явления, как зону нечувствительности, сухое трение и др.
Выбранные структуры операторов (порядки дифференциальных уравнений) обеспечивают адекватность моделей по отношению к сигналам, частоты которых не превышают заданного предела. Границу области адекватности W обычно удается несколько расширить путем усложнения структуры операторов. На рис.22 показана область адекватности моделей на плоскости амплитуд а и частот w сигналов.
Таким образом, модели систем управления оказываются не полностью определенными. При интерпретации результатов анализа и синтеза необходимо всегда иметь в виду неполную определенность моделей и учитывать ограниченность области их адекватности. Анализ наряду с выявлением основных свойств поведения систем управления должен включать и исследование чувствительности характеристик к вариациям параметров, структур операторов и топологии систем.
3. Нелинейные элементы систем управления
3.1 Безынерционные нелинейные элементы
В теории и практике управления элементы и системы рассматривают как преобразователи сигналов – носителей информации о цели, состоянии объекта и воздействиях среды (рис.23). Как известно, линейный безынерционный элемент полностью задается значением его коэффициента усиления.
 |
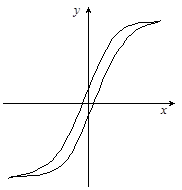
Нелинейные зависимости между постоянными значениями входных и выходных сигналов у = Р'(х) могут задаваться аналитически, графически или таблично. В том случае, когда нелинейный элемент (НЭ) имеет один вход и один выход, особенно наглядны графики статических характеристик (СХ) (рис.24).
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах