Математическое моделирование и расчет систем управления техническими объектами
где f – Р-мерный вектор входа;у – K-мерный вектор выхода; A – матрица состояний; B – матрица входа; C – матрица выхода; D – матрица обхода соответствующих размеров. Первую векторно-матричную строку в системе уравнений (18) называют уравнениями состояний, а вторую – уравнениями выхода.
Пример. При n = 2 дифференциальные уравнения (18) системы с одним входом и одни
м выходом в раскрытой форме запишутся так:
![]()
![]()
![]()
Матрицы будут иметь следующий вид:
A = ![]() ; B =
; B = ![]() ;
;
C = (c1 c2); D = d.
Если первое уравнение в системе (18) записать с использованием оператора дифференцирования р, то имеем: (pI – A)n = Bf, где I – единичная матрица. Таким образом, уравнения в форме пространства состояний являются частным случаем системы дифференциальных уравнений (17) с матрицей
A(p) = pI – A. (19)
Автономная система описывается однородным дифференциальным уравнением
![]() ;
; ![]() ,
,
причем начальные условия являются математическим отражением предыстории. Если они ненулевые, то система совершает так называемые свободные движения. В конечномерных системах свободные движения определяются полностью оператором А(р) и конечным числом начальных условий независимо от того, каким путем система пришла в это состояние к моменту начала наблюдения.
Автономная система может описываться системой дифференциальных уравнений различных порядков:
A(p)x(t) = 0, x(0);
y(t) = Cx(t),
а также дифференциальными уравнениями в форме пространства состояний
![]() = An, n(0);
= An, n(0);
y = Cn.
Рассмотрим построение моделей вход-выход по системе дифференциальных уравнений. Пусть дана система дифференциальных уравнений (17). Построение модели в терминах «вход-выход» означает исключение внутренних переменных, что проще выполнить, если от дифференциальных уравнений перейти к системе алгебраических уравнений для изображений, приняв нулевые начальные условия:
A(s)X(s) = B(s)F(s); (20)
Y(s) = CX(s).
При небольшом числе уравнений применяют метод последовательных исключений. Пусть, например, объект с одним входом f и одним выходом у имеет две внутренние переменные x1 и х2:
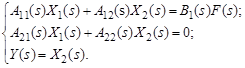 (21)
(21)
Решая систему (21) относительно Y(s), получим:
![]()
Теперь по выражению
![]()
легко получить полиномы числителя и знаменателя передаточной функции и записать выражение для одного дифференциального уравнения. Используем операции перемножения и вычитания полиномов.
В случае, когда требуется вычислить передаточную функцию, связывающую одну из выходных переменных у = xq с одним из воздействий fr, применяют правило Крамера:
![]() , (22)
, (22)
где полиномиальная матрица Aqr получена из матрицы А заменой q-го столбца r-м столбцом матрицы В. Знаменатель передаточной функции Wqr(s) независимо от номеров входа r и выхода q равен характеристическому полиному системы
A(s) = det A(s) (23)
Этот способ построения моделей вход-выход по системе уравнений (20) сводится к вычислению определителей полиномиальных матриц.
Для примера (21) запишем систему в матричной форме (20); матрицы имеют вид:
A(s) = ![]() ; B(s) =
; B(s) = ![]() . (24)
. (24)
В соответствии с правилом Крамера по формуле (23) определяем характеристический полином:
![]()
числитель передаточной функции W21(s) (здесь r = 1, q = 2) равен
det A21 = ![]()
![]()
Имеем систему алгебраических уравнений многомерной системы, записанную для изображений переменных (20). В общем случае передаточная матрица системы, т.е. модель вход-выход через полиномиальные матрицы выражается следующим образом:
W(s) = CA-1(s)B(s). (25)
Здесь вычисления связаны с обращением и перемножением полиномиальных матриц. Ясно, что полиномиальная матрица системы А(s) должна быть не особенной, иными словами, ее определитель не равен тождественно нулю. Известно, что
![]() ,
,
где А*(s) – присоединенная матрица.
Следовательно, выражение для передаточной матрицы (25) примет вид:
W(s) = CA*(s)B(s)/A(s). (26)
Пример. Модель вход-выход в виде линейного дифференциального уравнения
y(n) + a1y(n-1) + … + an-1y(1) + any = b0u(n) + b1u(n-1) + … + bnu
может быть приведена к модели в переменных состояния следующим образом:
x(1) = xi + 1 + ki*u, где i = 1, n-1;
x(1)n = – anx1 – an-1x2 –…– a1xn + knu;
y = x1 + k0u;
коэффициенты k рассчитываются по рекуррентным формулам:
k0 = b0;
k1 = b1 – a1k0;
…
![]() ;
;
![]() ,
,
где n = 3; a1 = 0; a2 = 2; a3 = 4; b0 = 2; b1 = b2 = 0; b3 = –1.
Определим значение ki:
k0 = b0 = 2;
k1 = b1 – a1*k0 = 0;
k2 = b2 – a1k1 – a2k0 = – 4;
k3 = b3 – a1k2 – a2*k1 – a3k0 = – 9.
Тогда исходное уравнение в переменных состояниях (нормальная форма):
x1(1) = x2;
x2(1) = x3 – 4u;
x3(1) = – 4x1 – 2x2 – 9u;
y = x1 + 2u,
или в векторной форме
![]() ;
;
![]() ,
,
где матрицы объекта, управления, наблюдения и обхода, соответственно,
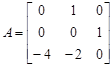 ;
;  ;
; ![]() ;
; ![]() .
.
2.5 Построение моделей вход-выход по уравнениям в форме пространства состояний
Пусть дифференциальные уравнения объекта или системы управления записаны в форме пространства состояний:
![]() An + Bf, n(0);
An + Bf, n(0);
(27)
y = Cn + df.
Для простоты примем одномерный случай: переменные входа и выхода f и y являются скалярами; матрица входа В – столбец; матрица выхода С – строка; d – скаляр обхода.
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах