Автоматизация комплекса центрального кондиционирования воздуха дорожного центра управления перевозками
![]() (3.39)
(3.39)
![]() (3.40)
(3.40)
![]() (3.41)
(3.41)
Т1 = 100 с
Т2 = 65 с
Т3 = 120 с
Т4 = 65 с
3.4 Расчет коэффициентов теплообменника 2-го подогрева
![]() (3.42)
(3.42)
![]() (3.43)
(3.43)
![]() (3.44)
(3.44)
![]() (3.45)
(3.45)
![]() С (3.46)
С (3.46)
![]() (3.47)
(3.47)
Зададимся приращением температуры входящего воздуха до 13.5ºС (D=5ºС):
![]() (3.48)
(3.48)
![]() (D = 4ºС) (3.49)
(D = 4ºС) (3.49)
![]() (D = 1.8ºС) (3.50)
(D = 1.8ºС) (3.50)
Зададимся уменьшением температуры воды до 65ºС (D = - 5ºС):
![]() (3.51)
(3.51)
![]() (D = - 1ºС) (3.52)
(D = - 1ºС) (3.52)
![]() (D = - 3.2ºС) (3.53)
(D = - 3.2ºС) (3.53)
![]() (3.38)
(3.38)
![]() (3.55)
(3.55)
Т1 = 80 с
Т2 = 100 с
3.5 Расчет коэффициентов оросительной камеры
Расчетные энтальпия и температура воздуха для Екатеринбурга в холодный период следующие:
I = - 34,6 кДж/кг
t = - 35ºС
Найдем влагосодержание воздуха.
![]() (3.57)
(3.57)
Если рассматривать процесс на I-d диаграмме (Приложение 1), то очевидно, что изменение влагосодержания входящего воздуха существенного влияния на выходные параметры воздуха не оказывает, что позволяет еще упростить структурную схему. К тому же графически можно определить коэффициенты передачи по каналам: tвх - tвых (для малых приращений) и tвх - dвых.
Кt = 0.4/1 = 0.4
Квл = 0.3/1 = 0.3 г/ (кг ºС)
Т1 = 60 с
Т2 = 1.7 с
Т3 = 5 с
Также для модели можно принять, то что температура подпитывающей воды остается неизменной.
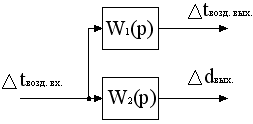
Рис.3.12 Упрощенная алгоритмическая структура камеры орошения по основным каналам
Выделим каналы управления:
Sклап. рекуп. - tглик. вых.;
Sклап.1под. - dвозд. прит.;
Sклап.1 под. - tводы вых.;
Sклап.2 под. - tвозд. прит.
В структурную схему установки не включены:
охлаждающий теплообменник, т.к он не участвует в работе установки в холодный период;
охлаждающий теплообменник рекуператора, т.к конденсация влаги затрудняет получение передаточного коэффициента по температуре (это касается и охлаждающего теплообменника), к тому же, этот теплообменник используется для изъятия максимума тепла из вытяжного воздуха без регулирования.
4. Управление технологическим комплексом
4.1 Выбор структуры управления технологического комплекса измельчения
Различают четыре ветви ГСП:
электрическую
пневматическую
гидравлическую
ветвь аппаратуры не использующая вспомогательной энергии.
Каждая из этих ветвей имеет свои особенности и специфику применения. Пневматическая ветвь приборов и средств автоматизации используется там, где имеется опасность возникновения взрыва (газ, пыль).
Гидравлическая ветвь приборов и средств автоматизации используется в тех случаях, когда требуются большие усилия для перемещения регулирующих органов (РО). Применение обеих, вышеуказанных ветвей ГСП ограничивается невозможностью передачи сигнала на большие расстояния из-за возможных потерь давления в импульсных линиях.
В работе принимаем электрическую ветвь ГСП, как наиболее полно отвечающую требованиям, разрабатываемых в ней систем (в том числе и локальной системы управления) и, учитывающую особенности их применения.
Электрическая ветвь приборов и её технические средства выгодно отличается от других ветвей ГСП, тем, что имеют большое быстродействие приборов и средств автоматизации этой ветви, практически, неограниченный радиус передачи электрического сигнала.
Кроме того, в электрической ветви приборов и средств автоматизации имеется большой выбор аппаратуры с унифицированными входными и выходными сигналами, что позволяет достаточно легко осуществлять компоновку этих элементов в системе.
Помещение, где будут установлены, принятые в работе средства автоматизации, в основном соответствуют, по условиям их эксплуатации, требованиям электробезопасных зон и помещений.
4.2 Выбор принципов контроля и управления комплексом
Известно, что существует три основных принципа автоматического управления:
управление по отклонению;
управление по возмущению;
комбинированный принцип управления (по возмущению и отклонению).
Каждый из этих принципов обладает своими достоинствами и недостатками.
Принцип управления по возмущению, обладает большим быстродействием, но требует точного математического описания функциональной зависимости y=f (Z) по которой, будет осуществляться управление Рисунок 4.1
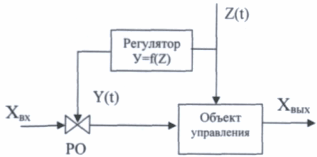
Рис.4.1
Принцип регулирования по отклонению обладает высокой точностью
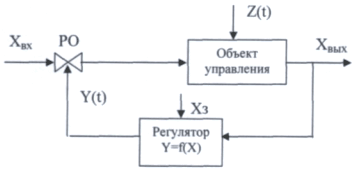
Рис.4.2
Комбинированный способ управления наиболее полно отвечает задачам управления объектами, так как включает в себя достоинства принципа управления по возмущению (быстродействие) и принципа управления по отклонению (высокая точность).
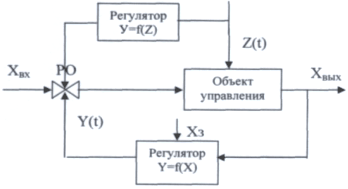
Рис.4.3
4.3 Управление системой
Система поддерживает два режима работы: ручной запуск и работа по расписанию (автоматически). В ручном режиме, пуском системы управляет оператор. В автоматическом, система запускается и останавливается в соответствии с расписанием (типовое расписание: запуск в 08: 00, останов в 18: 00).
Режим "зима-лето".
В зависимости от температуры наружного воздуха, различаются два режима работы системы: зима и лето. Зимний режим включается, когда температура наружного воздуха опускается ниже 6 градусов и выключается при 10 градусах либо принудительно с лицевой панели контроллера. В режиме "Зима" осуществляется нагрев и увлажнение приточного воздуха, обрабатываются сигналы: "давление воды с контуре первого подогрева ниже нормы" (по сигналу электроконтактного манометра поз.10 схемы автоматизации), "давление гликоля в системе рекуперации ниже нормы" (электроконтактный манометр, поз.11), "температура воздуха за теплообменником первого подогрева ниже допустимой" (капиллярный термостат, поз.5). Также этот режим предполагает предпусковой прогрев теплообменника первого подогрева
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем