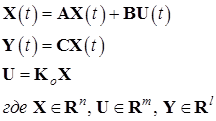
Математическая модель в пространстве состояний линейного стационарного объекта управления
2. Начальными условиями для системы на каждом отрезке будет точка, в которую пришла система на предыдущем отрезке:
![]()
![]()
![]()
![]()
3.
Вектор ![]() необходимо пересчитывать на каждом отрезке.
необходимо пересчитывать на каждом отрезке.
4. В остальном данная задача аналогична задаче построения линейного сервомеханизма (пункт 5.5).
Используя скрипт AKOR_slegenie_so_skolz_intervalami_Modern, получили следующие результаты:
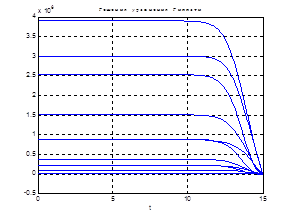
Рис.50. Графики решения уравнения Риккати.
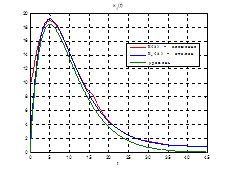
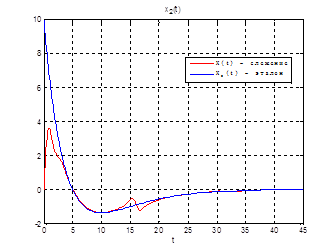
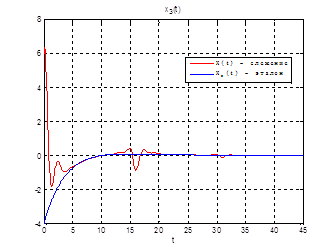
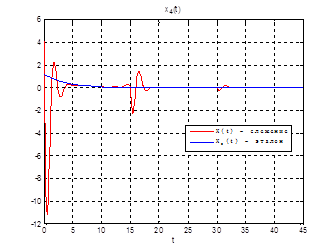
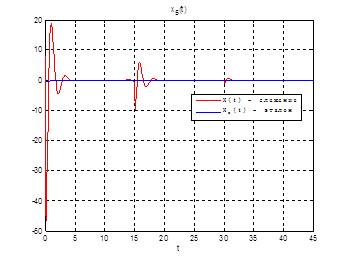
Рис.51. Графики фазовых координат.
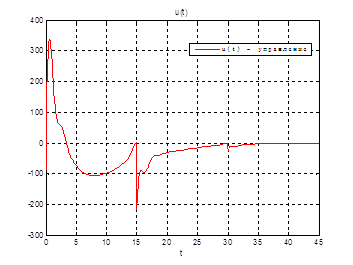
Рис.52. График управления.
Выводы: при сравнении полученных результатов, можно сказать, что различия в фазовых координатах при наличии трех участков и при наличии одного участка несущественные. Если сравнивать скорость вычислений и используемые ресурсы, то скорость увеличивается почти в 3 раза, а памяти требуется в 3 раза меньше для решения поставленной задачи. В точках соединения участков наблюдаются скачки, связанные с тем, что требуется значительные затраты на управление, но для первой координаты этот скачок незначительный.
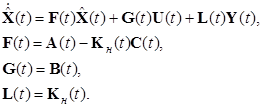
6. Синтез наблюдателя полного порядка
Наблюдателями называются динамические устройства, которые позволяют по известному входному и выходному сигналу системы управления получить оценку вектора состояния. Причем ошибка восстановления ![]() .
.
Система задана в виде:
Начальные условия для заданной системы ![]() .
.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
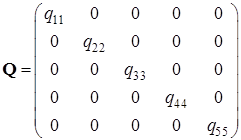 ,
, ![]() .
.
Построим наблюдатель полного порядка и получим значения наблюдаемых координат ![]() таких, что:
таких, что: ![]()
В качестве начальных условий для наблюдателя выберем нулевые н.у.:
![]()
Ранг матрицы наблюдаемости:
![]() - матрица
- матрица
наблюдаемости.
 .
.
![]() .
.
Т. е. система является наблюдаемой.
Коэффициенты регулятора:
![]() ,
,
тогда
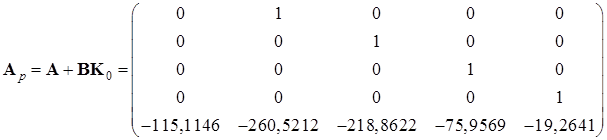
Собственные значения матрицы ![]() :
:
Коэффициенты наблюдателя выберем из условия того, чтобы наблюдатель был устойчивым, и ближайший к началу координат корень матрицы ![]() лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы
лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы ![]() . Выберем корни матрицы
. Выберем корни матрицы
![]()
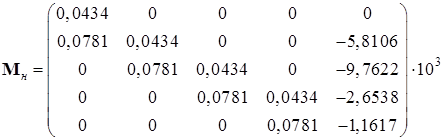
Коэффициенты матрицы наблюдателя:
![]() .
.
Используя скрипт Sintez_nablyud_polnogo_poryadka, получили следующие результаты:
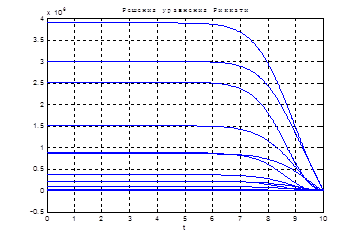
Рис.53. Графики решения уравнения Риккати.
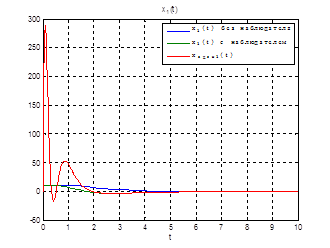
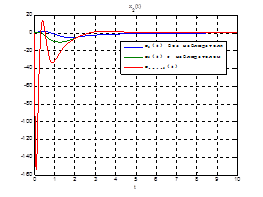
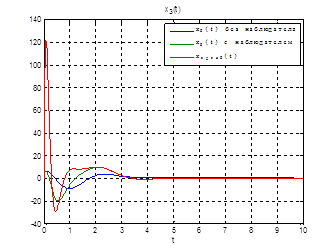
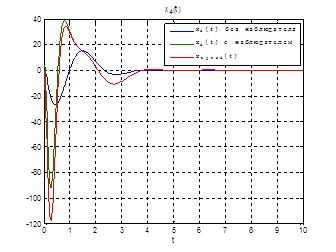
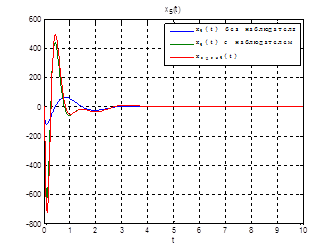
Рис.54. Графики фазовых координат.
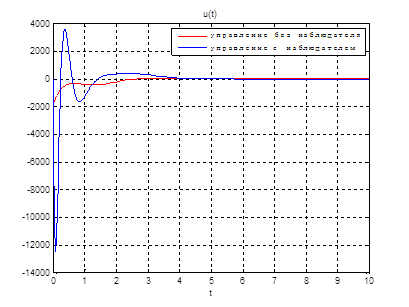
Рис.55. Графики управлений.
Выводы: Так как система является полностью наблюдаема и полностью управляема, то спектр матрицы ![]() может располагаться произвольно. Перемещая собственные значения матрицы
может располагаться произвольно. Перемещая собственные значения матрицы ![]() левее, относительно собственных значений матрицы
левее, относительно собственных значений матрицы ![]() мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
Литература
1. Методы классической и современной теории автоматического управления: Учебник в 5 – и т. Т.4: Теория оптимизации систем автоматического управления / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. – 748 с.
2. Краснощёченко В.И.: Методическое пособие: «Методы теории оптимального управления».
Приложение.
PlotTimeFrHaract.m
clc
clear all
close all
b1 = 9;
b0 = 5;
a4 = 0.1153;
a3 = 1.78;
a2 = 3.92;
a1 = 14.42;
a0 = 8.583;
% syms s w
% W_s_chislit = b1 * s + b0;
% W_s_znamen = s * (a4 * s^4 + a3 * s^3 + a2 * s^2 + a1 * s + a0);
%
% W_s_obj = W_s_chislit/W_s_znamen;
%A_w = collect(simplify(abs(subs(W_s_obj, s, i*w))))
%----------------------Построение АЧХ-------------------------------------%
figure('Name', '[0,10]');
w = 0 : 0.01 : 10;
A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2));
plot(w,A_w,'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('A(w)')
title('Function ACHX(w)')
%-------------------------------------------------------------------------%
r_ch = roots([b1 b0])
r_zn = roots([a4 a3 a2 a1 a0 0])
%----------------------Построение ФЧХ-------------------------------------%
figure('Name', '[0,100]');
Другие рефераты на тему «Экономико-математическое моделирование»:
- Применение экономико-математических методов при строительстве дорог и трубопроводов
- Анализ накладных расходов
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Построение неполной квадратичной регрессионной модели по результатам полного факторного эксперимента
- Математические методы экономических исследований
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели