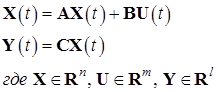
Математическая модель в пространстве состояний линейного стационарного объекта управления
 ,
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Время слежения ![]() .
.
Задающее воздействие в виде системы ДУ
ight=63 src="images/referats/14091/image367.png">
Начальные условия для воздействия:
![]() .
.
Введем расширенный вектор состояния и расширенные матрицы ![]()
 ,
,
 ,
,
 .
.
Тогда новое описание системы имеет вид:
![]()
с начальными условиями:  .
.
Решением уравнения Риккати будет матрица:
с н.у.![]()
Тогда оптимальное управление, находится по формуле:
![]()
Используя скрипт AKOR_slegenie_na_konech_interval_I_podxod, получили следующие результаты:
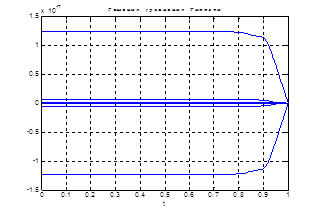
Рис.41. Графики решения уравнения Риккати.
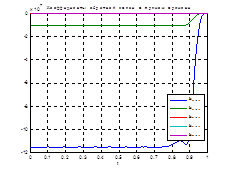
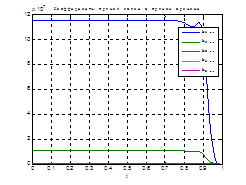
Рис.42. Графики коэффициентов регулятора обратной и прямой связи.
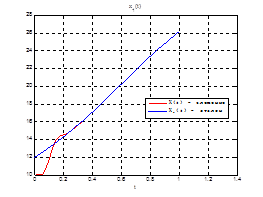
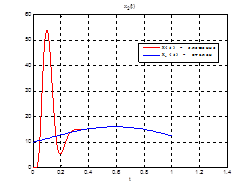
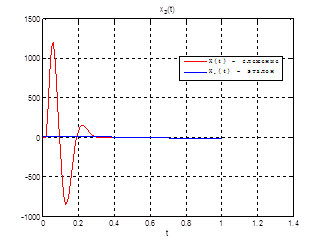
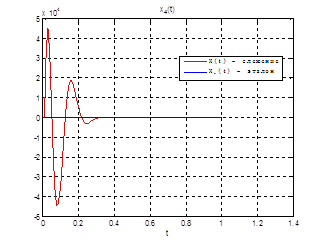
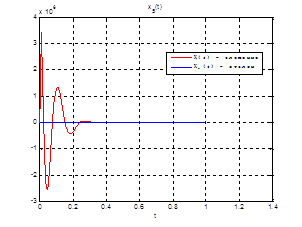
Рис.43. Графики фазовых координат.
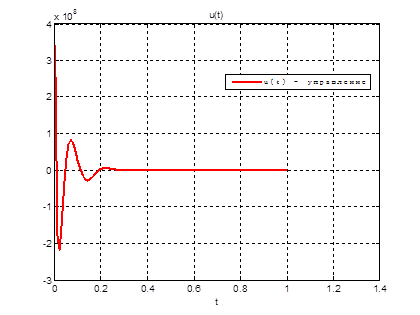
Рис.44. График управления.
Выводы: На данном этапе была решена задача АКОР-слежения. В качестве отслеживаемого воздействия была взята исходная система, но с другими начальными условиями, поэтому графики фазовых координат отличаются от заданных, но только на начальном участке движения.
5.5 Задача АКОР для отслеживания известного задающего воздействия. II подход (линейный сервомеханизм)
Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
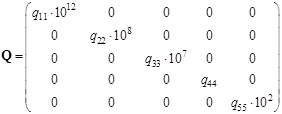
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Задающее воздействие имеет вид:
![]() ,
, ![]() .
.
Время слежения ![]()
Введём вспомогательную вектор-функцию ![]() , ДУ которой определяется
, ДУ которой определяется ![]()
![]() ,
,
![]() ,
,
НУ определяются из соотношения
Зная закон изменения ![]() и
и ![]() , можно определить управление:
, можно определить управление:
![]() .
.
Используя скрипт AKOR_slegenie_na_konech_interval_II_podxod, получили следующие результаты:
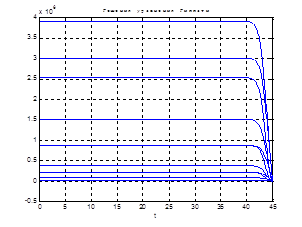
Рис.45. Графики решения уравнения Риккати.
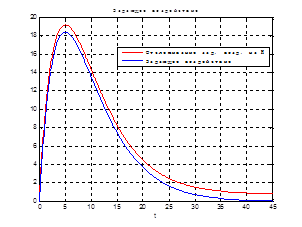
Рис.46. График задающего воздействия.
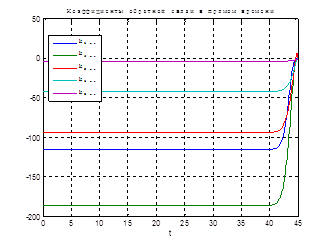
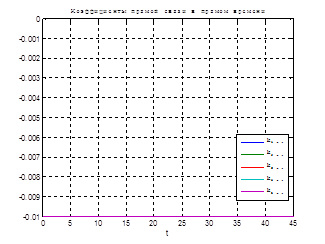
Рис.47. Графики коэффициентов регулятора обратной и прямой связи.
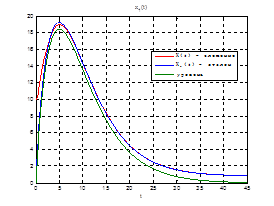
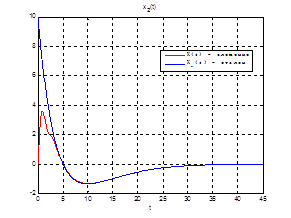
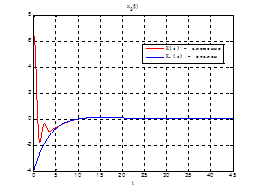
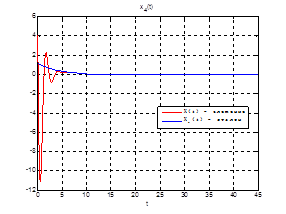
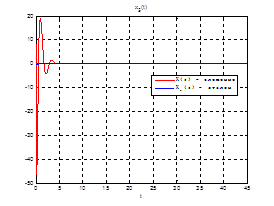
Рис.48. Графики фазовых координат.
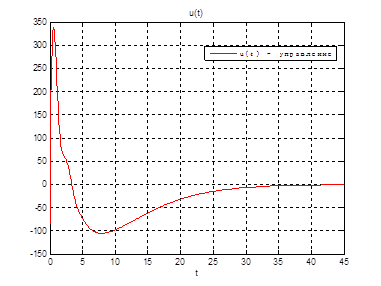
Рис.49. График управления.
Выводы: На данном этапе была решена задача построения линейного сервомеханизма. В качестве отслеживаемого воздействия была задана экспоненциальная функция. Анализируя выше приведенные графики, можно сказать, что все состояния заданной системы, особенно первая фазовая координата, отслеживается с заданной точностью.
5.6 Задача АКОР – слежения со скользящими интервалами
Пусть интервал времени ![]() является объединением нескольких отрезков. Известно некоторое задающее воздействие
является объединением нескольких отрезков. Известно некоторое задающее воздействие ![]() заданное аналитическим выражением, причем информация о задающем сигнале на следующем отрезке времени поступает только в конце предыдущего. Таким образом, зная задающий сигнал только на одном отрезке времени, мы будем синтезировать управление на этом отрезке.
заданное аналитическим выражением, причем информация о задающем сигнале на следующем отрезке времени поступает только в конце предыдущего. Таким образом, зная задающий сигнал только на одном отрезке времени, мы будем синтезировать управление на этом отрезке.
Разобьем весь интервал на 3 равных отрезка.
Данная задача похожа на задачу отслеживания известного задающего воздействия, заданного аналитическим выражением, но с некоторыми изменениями:
1. Поскольку в уравнение Риккати относительно матрицы ![]() входят только параметры системы и функционала качества, то решать его будем один раз на первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но будет смещено по времени:
входят только параметры системы и функционала качества, то решать его будем один раз на первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но будет смещено по времени:
![]()
![]()
![]()
![]()
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели