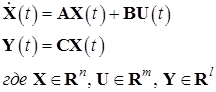
Математическая модель в пространстве состояний линейного стационарного объекта управления
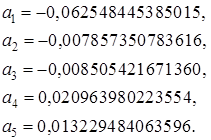
Числовое значение найденных моментов:
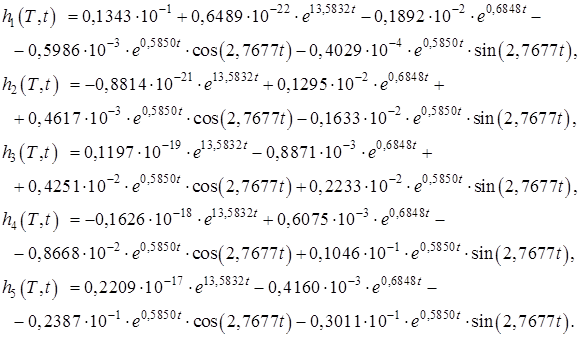
Моментные функции:
Заметим, что моменты и моментные функции совпадают с моментами и моментными функциями, найденными в пункте (а).
Из этого следует, что функционал, значения ![]() , управление и минимальная энергия будут иметь точно такие же числовые значения и аналитические выражения, как и в пункте (3.1).
, управление и минимальная энергия будут иметь точно такие же числовые значения и аналитические выражения, как и в пункте (3.1).
Оптимальное управление имеет вид:

Проверим правильность полученного решения.
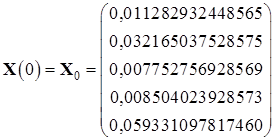
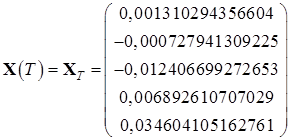
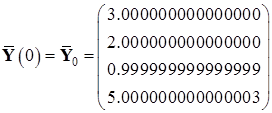
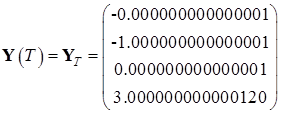
Эталонные значения координат в начальный и конечный момент времени:
 ,
, 
 ,
, 
Найденные значения координат в начальный и конечный момент времени:
 ,
, 
 ,
, 
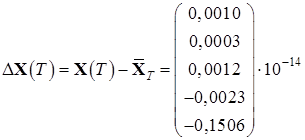
Вычислим погрешность полученных результатов:
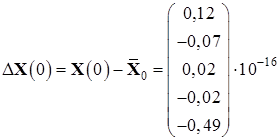 ,
, 
 ,
, 
Ниже представлены графики полученного решения с помощью скрипта Optimal_L_problem_moments.m.
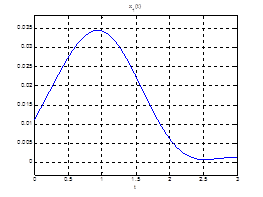
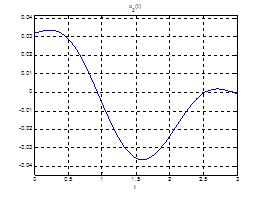
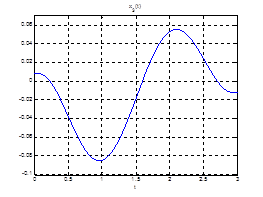
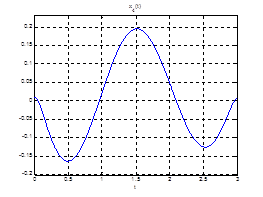
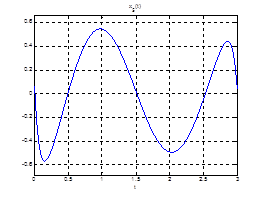
Рис. 18. Графики фазовых координат системы при переходе из ![]() в
в ![]() .
.
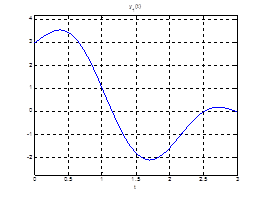
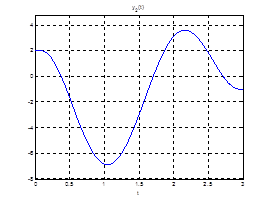
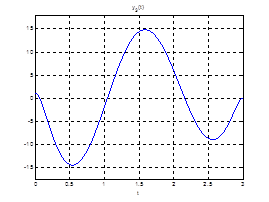
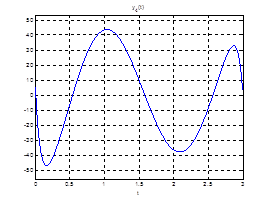
Рис. 19. Графики выходных координат системы при переходе из ![]() в
в ![]() .
.
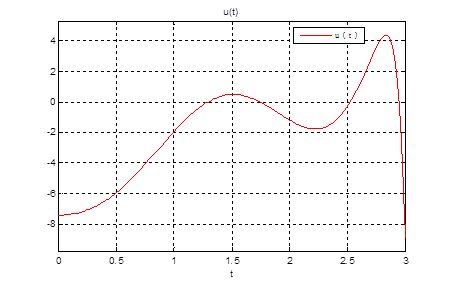
Рис.20. График оптимального управления ![]() .
.
Выводы: Задача перевода системы из начальной точки в конечную с помощью L-проблемы моментов в пространстве состояний и в пространстве вход-выход была решена с точностью до 12-го знака после запятой. Результаты, полученные при переводе системы из начальной точки в конечную, полностью совпадают.
4. Нахождение оптимального управления с использованием грамиана управляемости (критерий – минимизация энергии)
Система имеет вид:
с начальными условиями:
,
![]() .
.
Составим матрицу управляемости и проверим управляемость системы:
![]()

![]() .
.
Составим грамиан управляемости для данной системы:
Найдем грамиан по формуле:

Тогда управление имеет вид:
![]() .
.
или

Ниже представлен график оптимального управления полученного с помощью скрипта Gramian_Uprav.m.:
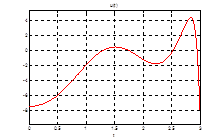
Рис.21. График оптимального управления ![]() .
.
Графики фазовых координат аналогичны, как и в оптимальной L – проблеме моментов.
Сравним управление, полученное в начальной и конечной точках в пунктах 3 и 4 соответственно:
 и
и 
Выводы: Как видно, значения граничных управлений совпадают. А это значит, что задача перевода объекта из начального состояния в конечное решена с высокой степенью точности и с минимальной энергией.
Графическое сравнение оптимальных управлений из пунктов 3 и 4:
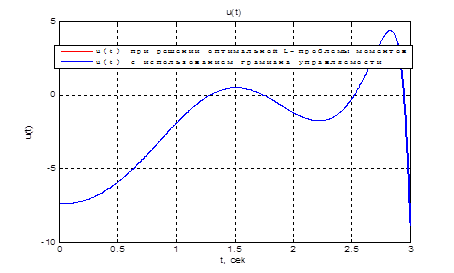
Рис.21. Сравнение графиков оптимального управления ![]() .
.
5. Аналитическое конструирование оптимальных регуляторов (АКОР)
5.1 Стабилизации объекта управления на полубесконечном интервале времени
Рассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Необходимо получить закон управления
![]()
минимизирующий функционал вида

Начальные условия для заданной системы ![]()
Моменты времени ![]() фиксированы. Матрицы
фиксированы. Матрицы ![]() — симметричные неотрицательно определенные:
— симметричные неотрицательно определенные:
![]()
матрица ![]() — положительно определенная:
— положительно определенная:
![]()
Матричное дифференциальное уравнение Риккати имеет вид:
![]()
Другие рефераты на тему «Экономико-математическое моделирование»:
- Примеры решения эконометрических заданий
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Математическое моделирование роста доходности страховой компании
- Методика эксперимента и расчет технологического режима получения антифрикционного покрытия
- Однофакторный регрессионный анализ при помощи системы GRETL
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели