Проект четырехкоординатного прецизионного многоцелевого станка горизонтальной компоновки
![]() мм
мм
![]() , (2.40)
, (2.40)
![]() мм
мм
![]() , (2.41)
, (2.41)
![]() мм
мм
где hp– глубина впадины шкива, принимаем hp=0,85 мм
Шаг зубьев шкивов tш, мм, на наружном диаметре вычисляется по формуле:
 , (2.42)
, (2.42)
![]() мм
мм
 , (2.43)
, (2.43)
![]() мм
мм
 , (2.44)
, (2.44)
![]() мм
мм
 , (2.45)
, (2.45)
![]() мм
мм
Боковой зазор между ремнем и шкивом f, мм, вычисляется по формуле:
![]() , (2.46)
, (2.46)
![]() мм
мм
Радиальный зазор между ремнем и шкивом e, мм, вычисляется по формуле:
![]() , (2.47)
, (2.47)
![]() мм
мм
Форма зубьев трапецеидальная.
Высоту зубьев и ширину впадин шкивов выбираем в зависимости от модуля m, соответственно принимаем h=6 мм и S =7,5±0,3 мм (при m=7).
Угол ![]() .
.
Толщина обода δ, мм, вычисляется по формуле:
![]() , (2.48)
, (2.48)
![]() мм
мм
Длина ремня L, мм, вычисляется по формуле:
![]() , (2.49)
, (2.49)
![]() мм
мм
![]() , (2.50)
, (2.50)
![]() мм
мм
где zp– число зубьев ремня, принимаем zp1 =60 и zp2 =80.
2.4 Построение свертки коробки скоростей
2.4.1 Разработка компоновочной схемы коробки скоростей
Компоновочная схема разрабатывается в следующем порядке:
а) определяются расстояния между осями валов и проводятся осевые линии;
б) на осях располагаются зубчатые колеса, муфты и другие передачи, и механизмы в соответствии с кинематической схемой. При этом нужно обеспечить возможность перемещения подвижных зубчатых колес и муфт, размещения механизмов управления, регулирования подшипников, сборки и разборки узла, а также обратить внимание на то, чтобы передвижные блоки зубчатых колес не сцепились одновременно с двумя неподвижными колесами на смежном валу;
в) вдоль оси каждого вала проставляются все соответствующие конструктивные размеры, что позволяет определить его ориентировочную длину.
2.4.2 Вычерчивание свертки коробки скоростей
а) выбирается положение оси шпинделя;
б) из центра шпинделя проводится окружность радиусом, равным расстоянию между осью шпинделя и осью соседнего вала. Любая точка на этой окружности может быть центром этого вала, и будет удовлетворять условию зацепляемости колес. Центр выбирается с учетом возможности рационального расположения и остальных валов;
в) таким же путем определяются центры других валов. При расположении валов необходимо обеспечить простую форму корпуса, удобство его обработки, сборки и разборки. Нужно стремиться располагать центры валов на одних тех же линиях, как по вертикали, так и по горизонтали, что делает корпус более технологичным.
2.4.3 Определение усилий действующих в зубчатых зацеплениях
На основе построенной свертки выполняется расчетная схема, представляющая собой условное изображение расчетной цепи зубчатых передач. В полюсе зацепления каждой зубчатой пары, по нормали к боковым поверхностям зубьев, действуют силы Fn, H, величина которых определяется по формуле:
![]() (2.51)
(2.51)
где m и z – модуль и число зубьев зубчатого колеса;
Т – вращающий момент, приложенный к валу зубчатого колеса, Н×м.
Сила, действующая со стороны шестерни на втором валу на зубчатое колесо третьего вала:
![]() кН
кН
На рисунке 8 представлена расчетная схема свертки коробки скоростей.
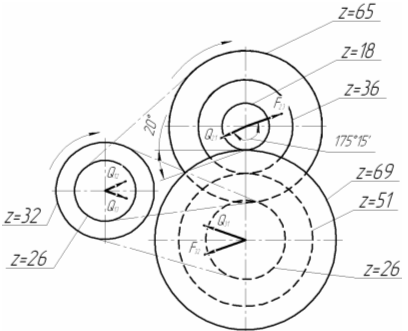
Рисунок 8 – Расчетная схема свертки коробки скоростей
2.5 Расчет и подбор подшипников
2.5.1 Определение реакций в опорах валов
На основе выполненной компоновочной схемы составляется расчетная схема каждого вала, на которой указываются все силы, действующие на вал, приложенные в соответствующих точках.
Данная схема позволяет определить реакции в каждой опоре с помощью уравнений статики, которые имеют следующий вид:
![]() ,
, ![]() ,
, ![]() (2.52)
(2.52)
где SFkx – сумма всех сил, действующих в плоскости Оzx, Н;
SFky – сумма всех сил, действующих в плоскости Оzy, Н;
Smо(Fk) – сумма моментов сил относительно выбранной точки плоскости.
2.5.2 Выбор подшипников по статической грузоподъемности
Критерием для подшипника служит неравенство:
Pо£Cо, (2.53)
где Ро – эквивалентная статическая нагрузка;
Со – табличное значение статической грузоподъемности выбранного подшипника.
Величины приведенной статической нагрузки для радиальных подшипников Po, Н, определяются как большие из двух следующих значений:
Pо = XоFr + YоFa; Pо = Fr, (2.54)
где Хо – коэффициент радиальной нагрузки;
Yо – коэффициент осевой нагрузки;
Fr – постоянная по величине и направлению радиальная нагрузка, Н;
Fа – постоянная по величине и направлению осевая нагрузка, Н.
2.5.3 Выбор подшипников по динамической грузоподъемности
Критерием для выбора подшипника служит неравенство:
Стр. £ С , (2.55)
где Cтр – требуемая величина динамической грузоподъемности подшипника, Н;
С – табличное значение динамической грузоподъемности выбранного подшипника, Н.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды