Проект четырехкоординатного прецизионного многоцелевого станка горизонтальной компоновки
![]() мм
мм
Боковой зазор между ремнем и шкивом f, мм, вычисляется по формуле:
![]() , (2.46)
, (2.46)
![]() мм
мм
Радиальный зазор между ремнем и шкивом e, мм, вычисляется по формуле:
Форма зубьев трапецеидальная.
Высоту зубьев и ширину впадин шкивов выбираем в зависимости от модуля m, соответственно принимаем h=6 мм и S =7,5±0,3 мм (при m=7).
Угол Толщина обода δ, мм, вычисляется по формуле:
Длина ремня L, мм, вычисляется по формуле:
где zp– число зубьев ремня, принимаем zp1 =60 и zp2 =80.
2.4 Построение свертки коробки скоростей
2.4.1 Разработка компоновочной схемы коробки скоростей
Компоновочная схема разрабатывается в следующем порядке:
а) определяются расстояния между осями валов и проводятся осевые линии;
б) на осях располагаются зубчатые колеса, муфты и другие передачи, и механизмы в соответствии с кинематической схемой. При этом нужно обеспечить возможность перемещения подвижных зубчатых колес и муфт, размещения механизмов управления, регулирования подшипников, сборки и разборки узла, а также обратить внимание на то, чтобы передвижные блоки зубчатых колес не сцепились одновременно с двумя неподвижными колесами на смежном валу;
в) вдоль оси каждого вала проставляются все соответствующие конструктивные размеры, что позволяет определить его ориентировочную длину.
2.4.2 Вычерчивание свертки коробки скоростей
а) выбирается положение оси шпинделя;
б) из центра шпинделя проводится окружность радиусом, равным расстоянию между осью шпинделя и осью соседнего вала. Любая точка на этой окружности может быть центром этого вала, и будет удовлетворять условию зацепляемости колес. Центр выбирается с учетом возможности рационального расположения и остальных валов;
в) таким же путем определяются центры других валов. При расположении валов необходимо обеспечить простую форму корпуса, удобство его обработки, сборки и разборки. Нужно стремиться располагать центры валов на одних тех же линиях, как по вертикали, так и по горизонтали, что делает корпус более технологичным.
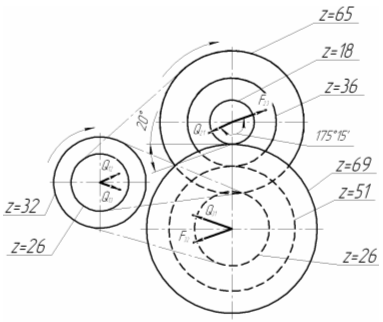
2.4.3 Определение усилий действующих в зубчатых зацеплениях
На основе построенной свертки выполняется расчетная схема, представляющая собой условное изображение расчетной цепи зубчатых передач. В полюсе зацепления каждой зубчатой пары, по нормали к боковым поверхностям зубьев, действуют силы Fn, H, величина которых определяется по формуле:
где m и z – модуль и число зубьев зубчатого колеса;
Т – вращающий момент, приложенный к валу зубчатого колеса, Н×м.
Сила, действующая со стороны шестерни на втором валу на зубчатое колесо третьего вала:
На рисунке 8 представлена расчетная схема свертки коробки скоростей.
Рисунок 8 – Расчетная схема свертки коробки скоростей
2.5 Расчет и подбор подшипников
2.5.1 Определение реакций в опорах валов
На основе выполненной компоновочной схемы составляется расчетная схема каждого вала, на которой указываются все силы, действующие на вал, приложенные в соответствующих точках.
Данная схема позволяет определить реакции в каждой опоре с помощью уравнений статики, которые имеют следующий вид:
где SFkx – сумма всех сил, действующих в плоскости Оzx, Н;
SFky – сумма всех сил, действующих в плоскости Оzy, Н;
Smо(Fk) – сумма моментов сил относительно выбранной точки плоскости.
2.5.2 Выбор подшипников по статической грузоподъемности
Критерием для подшипника служит неравенство:
Pо£Cо, (2.53)
где Ро – эквивалентная статическая нагрузка;
Со – табличное значение статической грузоподъемности выбранного подшипника.
Величины приведенной статической нагрузки для радиальных подшипников Po, Н, определяются как большие из двух следующих значений:
Pо = XоFr + YоFa; Pо = Fr, (2.54)
где Хо – коэффициент радиальной нагрузки;
Yо – коэффициент осевой нагрузки;
Fr – постоянная по величине и направлению радиальная нагрузка, Н;
Fа – постоянная по величине и направлению осевая нагрузка, Н.
2.5.3 Выбор подшипников по динамической грузоподъемности
Критерием для выбора подшипника служит неравенство:
Стр. £ С , (2.55)
где Cтр – требуемая величина динамической грузоподъемности подшипника, Н;
С – табличное значение динамической грузоподъемности выбранного подшипника, Н.
Требуемая динамическая грузоподъемность Cmp, Н, определяется по формуле:
где Р – эквивалентная динамическая нагрузка, Н;
n – частота вращения вала для которого подбирается подшипник, об/мин;
Lh – долговечность подшипника, выраженная в часах работы;
a – коэффициент, зависящий от формы кривой контактной усталости.
Эквивалентная динамическая нагрузка для шариковых радиальных подшипников P, Н, определяется по формуле:
P = (XVFr + YFa)KбKт, (2.57)
где Fr – радиальная нагрузка, приложенная к подшипнику;
Fa – осевая нагрузка, приложенная к подшипнику;
V – коэффициент вращения;
Kб – коэффициент безопасности;
Kт – температурный коэффициент.
2.5.4 Выбор подшипников по диаметру вала
При выборе подшипников по таблицам должен быть учтен необходимый по условию прочности диаметр вала. Для определения диаметра вала под установку подшипника строятся эпюры крутящих и изгибающих моментов.[4]
Диаметр участка вала d, мм, работающего на чистое кручение, определяется по формуле:
![]() мм
мм
![]() .
.
![]() , (2.48)
, (2.48)
![]() мм
мм
![]() , (2.49)
, (2.49)
![]() мм
мм
![]() , (2.50)
, (2.50)
![]() мм
мм
![]() (2.51)
(2.51)
![]() кН
кН
![]() ,
, ![]() ,
, ![]() (2.52)
(2.52)
 , (2.56)
, (2.56)
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела