Анализ погрешностей спутниковой радионавигационной системы, работающей в дифференциальном режиме
Содержание и расположение информации для ионосферной коррекции GPS приведено в таблице 2.6.
Таблица 2.6 – Информация по параметрам для ионосферной коррекции
|
№ |
Расположение информации: слово, разряды |
Символьно е обозначение |
Содержание информации |
Цена деления младшего разряда |
Единицы измерений | |
|
Подкадр 4, строка 18 | ||||||
|
1 |
Слово 3 Разряды 9-16 |
α0 |
Коэффициенты позволяют потребителю применить модель ионосферы для расчета ионосферной задержки. У всех коэффициентов старший разряд является знаковым (+ или -) |
2-30 |
Секунда/ полуцикл | |
|
2 |
Слово 3 Разряды 17-24 |
α1 |
2-27 |
Секунда/ полуцикл | ||
|
3 |
Слово 4 Разряды 1-8 |
α 2 |
2-24 |
Секунда/ (полуцикл)2 | ||
|
4 |
Слово 4 Разряды 9-16 |
α 3 |
2-24 |
Секунда/ (полуцикл)3 | ||
|
5 |
Слово 4 Разряды 17-24 |
β 0 |
211 |
Секунда | ||
|
214 |
Секунда/ (полуцикл) | |||||
|
6 |
Слово 5 Разряды 1-8 |
β 1 | ||||
|
216 |
Секунда/ (полуцикл)2 | |||||
|
7 |
Слово 5 Разряды 9-16 |
β 2 | ||||
|
216 |
Секунда/ (полуцикл)3 | |||||
|
8 |
Слово 5 Разряды 17-24 |
β 3 | ||||
2.4 Аппаратура потребителя
К числу потребителей СРНС второго поколения относятся наземные объекты (подвижные и неподвижные), летательные аппараты (высокодинамичные и низкодинамичные) и др. В зависимости от типа потребителя требования к точностным характеристикам, числу измеряемых координат и составляющих скорости, допустимому времени вхождения в синхронизм, массогабаритным показателям и стоимости аппаратуры потребителя колеблются в широких пределах. Для наземных и морских объектов достаточно ограничиться измерением двух координат и двух составляющих скорости. Для летательных аппаратов число измеряемых координат и составляющих скорости возрастает до трех. Поэтому номенклатура модификаций бортовой аппаратуры весьма обширна.
Основными задачами, решаемыми аппаратурой потребителя, являются: выбор рабочего созвездия ИСЗ, поиск и опознавание навигационных сигналов ИСЗ, введение в синхронизм систем слежения по времени запаздывания и фазе несущей частоты дальномерных сигналов, измерение времени запаздывания и доплеровского сдвига частоты, выделение и расшифровка содержания навигационного (информационного) сообщения, расчет координат ИСЗ на момент навигационных измерений, решение навигационной задачи (определение координат и составляющих вектора скорости потребителя, поправок к сдвигу шкал времени и частот), отображение вычисленных данных на информационном табло.
На вход аппаратуры потребителя поступают сигналы от навигационных спутников, находящихся в зоне радиовидимости. Так как для решения навигационной задачи необходимо измерить псевдодальности и псевдоскорости относительно, как минимум, четырех ИСЗ, то АП должна быть многоканальной (от 4 до 12 каналов при работе по одной из систем и более 12 при совмещенной работе по системам ГЛОНАСС и NAVSTAR).
Современные АП являются аналого-цифровыми системами, сочетающими аналоговую и цифровую обработку сигналов. Переход на цифровую обработку осуществляется на одной из промежуточных частот. Основой типового варианта АП являются антенный блок, радиочастотный тракт, коррелятор и вычислительное устройство, представленные на рис. 2.3.
В антенном блоке (АБ) совокупность сигналов от ИСЗ, принятых антенной, усиливается в предварительном усилителе и фильтруется во всей полосе (от 1570 до 1625 МГц в совмещенной АП) несущих частот полосовым фильтром.
В качестве антенны часто используется микрополосковая, что обусловлено ее малой массой и габаритными размерами, простотой изготовления и дешевизной. Микрополосковая антенна состоит из двух параллельных проводящих слоев, разделенных диэлектриком; нижний проводящий слой является заземленной плоскостью, верхний ― собственно излучателем антенны (по форме излучатель может быть прямоугольником, эллипсом, пятиугольником и т.д.). Микрополосковая антенна имеет диаграмму направленности, обеспечивающую прием сигналов правосторонней круговой поляризации из верхней полусферы. Применяются и другие типы слабонаправленных антенн.
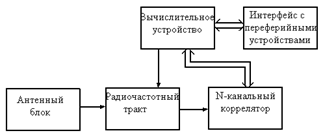
Рис. 2.3. Структурная схема аппаратуры потребителя
Полосовой фильтр осуществляет фильтрацию сигналов в полосе частот ![]() МГц. На выходе блока имеется радиочастотный соединитель, к которому подключается коаксиальный кабель, соединяющий АБ с радиочастотным трактом.
МГц. На выходе блока имеется радиочастотный соединитель, к которому подключается коаксиальный кабель, соединяющий АБ с радиочастотным трактом.
Радиочастотный тракт навигационного приемника является многоканальным устройством, в котором, как отмечалось выше, проводится аналоговое усиление сигналов, фильтрация и преобразование несущей частоты сигналов ИСЗ (понижение частоты), а также преобразование аналогового сигнала в цифровую форму. Так как в СРНС ГЛОНАСС сигнал от каждого из спутников имеет свою несущую частоту, то каждый канал должен быть настроен на частоту сигнала одного из ИСЗ и селектировать частоты сигналов других ИСЗ. Схема такого приемника приведена на рис. 2.4.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем