Анализ погрешностей спутниковой радионавигационной системы, работающей в дифференциальном режиме
В современных АП навигационные вычислители реализуются на базе сигнальных процессоров. Этому способствует обширный выбор процессоров, предоставляемый разработчикам фирмами производителями, доступность технической информации, наличие мощных инструментальных и программных средств отладки (позволяющие писать программы на языке высокого уровня).
3. Дифференциальный режим р
аботы спутниковой навигационной системы
Глобальная Система Определения Координат Местоположения (GPS) является системой определения местоположения на базе спутниковой информации, которая непрерывно функционирует в течение 24 часов каждый день. GLONASS является такой же системой. В настоящее время планируется дополнить эти системы геостационарными спутниками с передатчиками, работающими в том же частотном диапазоне [7].
В интегральном составе эти системы называют Глобальными Навигационными Спутниковыми Системами (GNSS).
В основе метода дифференциальной навигации, лежит относительное постоянство значительной части погрешности измерения навигационной величины или погрешности расчета координат во времени и в пространстве. Необходимость использования дифференциального режима СРНС определяется стремлением удовлетворить наиболее жесткие требования навигационного обеспечения таких задач, как посадка воздушных судов, мореплавание в проливных зонах и узкостях, геодезическая привязка и т.п.
Дифференциальный режим GNSS достигается за счет размещения опорной станции с приемником GNSS в точке с известными координатами, определения поправок к сигналам дальности спутников и передачи этих поправок пользователям. Это исключает большую часть ошибок смещения, общих для всех приемников и значительно улучшает позиционную точность. Точность после этого ограничивается шумами приемника пользователя, межканальными смещениями и неопределенностями дифференциальной станции.
Специальный комитет 104 RTCM (SC-104) “Дифференциальное функционирование GNSS” имеет технические и официальные издания, а также сформулированные рекомендации в следующих областях:
1. Сообщение с данными и формат - Сообщение, элементы которого определяют поправки, сообщения о состоянии, параметрах станции и служебных данных определены в деталях. Они структурированы в формат данных, подобных тому, в котором выдаются сигналы GPS спутников, но при этом используются форматы переменной длины.
2. Интерфейс пользователя - Определен стандартный интерфейс, который позволяет использовать приемник во взаимодействии с множеством различных линий передачи данных. Например, при использовании стандарта, приемник может применяться со спутниковой или радиомаячной линией передачи данных.
Ранее комитет решил, что поправки должны относиться к измерениям псевдодальности, а не к измеренному положению, несмотря на то, что результирующее сообщение значительно длиннее. Причина заключается в том, что пользователь и опорная станция могут использовать различные спутники, в зависимости от большого числа условий. Если это происходит, даже в том случае, когда три из четырех спутников одинаковы, позиционная ошибка от одного не общего спутника может быть слишком велика.
Причины, по которым пользователь и опорная станция отрабатывают данные от разных спутников, следующие:
· Критерий выбора спутников приемниками может быть разным.
· Рельеф или кривизна земли могут затенять низко расположенные спутники от пользователя или опорной станции.
· Приемник пользователя может применять стратегию использования всех спутников, находящихся в поле зрения, по которой все видимые спутники используются для определения местоположения.
· Набор спутников доступных в месте нахождения пользователя может отличаться от того, который доступен в месте размещения опорной станции. Передаваемые поправки к псевдодальностям всех спутников, которые находятся в поле зрения опорной станции, могут использоваться приемником пользователя в дифференциальном режиме (т.е. выбираются только те поправки, которые относятся к спутникам, находящимся в поле зрения пользователя) для определения местоположения. Геометрия дифференциальной GNSS показана на рисунке 3.1.
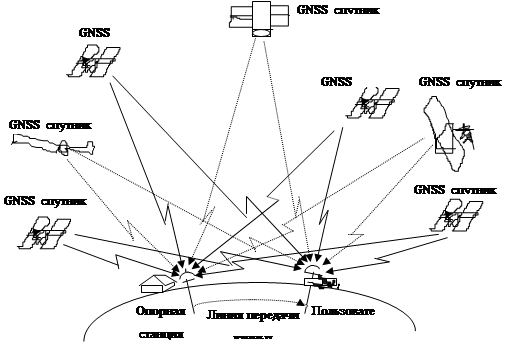
Рисунок 3.1 – Геометрия дифференциальной GNSS.
Дифференциальный режим GPS и/или GLONASS предполагает получение точностей 1-10 метров для динамических навигационных приложений. При использовании кинематической технологии обработки фазы несущей GNSS в дифференциальном режиме можно достичь точностей лучше, чем 10 см для небольших дальностей, менее 20 км. Базовая концепция дифференциального режима GNSS подобна той, какая используется в дифференциальном режиме LORAN-C, в дифференциальном режиме OMEGA и в режиме транслокации, применяемом в TRANSIT.
Дифференциальная технология работает, если преобладающие ошибки являются систематическими ошибками, вызванными причинами, находящимися вне приемника. Это относится к случаю GPS и GLONASS [7]
3.1 Принцип дифференциального режима
Дифференциальный режим работы системы состоит в следующем. Сигналы с навигационных спутников принимаются не только конечным потребителем, но и базовой (базовыми) станциями с известными координатами. Базовая станция вычисляет величину поправки измеренных координат относительно истинных заранее известных. Далее, основываясь на гипотезе что постоянная составляющая погрешности потребителя и базовой станции приблизительно равны, эта поправка отправляется потребителю и учитывается при расчетах координат потребителя.
Источники [1, 8] позволяют провести следующую классификацию современных дифференциальных систем спутниковой навигации.
1. Системы дифференциальной навигации по кодовым и псевдофазовым измерениям. Системы дифференциальной навигации по кодовым измерениям строятся на основе измерения и обработки псевдодальностей, в общем случае, имеют неограниченную область действия и характеризуются ошибками местоопределения от долей метра до нескольких метров. Системы дифференциальной навигации по псевдофазовым измерениям характеризуются очень высокой точностью местоопределения (до долей сантиметра). Однако область их действия ограничена дальностью ~10–12 км в одночастотном режиме и ~100 км в двухчастотном режиме. Специфической особенностью дифференциальных систем по псевдофазовым измерениям является неоднозначность этих измерений, затрудняющая их использование. Системы дифференциальной навигации по псевдофазовым измерениям иногда называют системами относительных определений [8].
2. Системы дифференциальной навигации по кодовым измерениям, в свою очередь, разделяют на локальные (Local Area Differential GPS), широкодиапазонные (Wide Area Differential GPS, WADGPS) и глобальные (Global Differential GPS, GDGPS). Дальнейшая уточняющая классификация систем дифференциальной навигации будет проводиться только для систем на основе кодовых измерений.
3. Большинство современных систем дифференциальной навигации являются локальными. Они используют только одну наземную станцию измерений и формирования дифференциальных поправок (далее будем называть её дифстанцией). Дифстанция располагается в центре локальной зоны, размер которой согласно [8] может доходить до 200 км. В центре зоны обеспечивается точность местоопределения порядка 0,5–1 м. На периферии зоны точность ухудшается и постепенно приближается к точности абсолютных местоопределений. Дифференциальные поправки в локальных системах дифференциальной навигации могут формироваться на основе метода коррекции координат (the position–domain approach) и метода коррекции навигационных параметров (the measurement–domain approach). На практике большее распространение получил второй метод, в котором дифстанция формирует поправки к измерениям псевдодальностей для каждого из видимых ею спутников. Потребитель поправляет свои измерения псевдодальностей по тем же спутникам на значения, полученные от дифстанции. Для передачи поправок, сформированных в соответствии с методом коррекции навигационного параметра, был разработан специальный стандарт RTCM SC-104, учитывающий в настоящее время особенности навигационных систем GPS.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем