Преобразование и расчет характеристик математических моделей объекта управления
Задание на курсовую работу
Дано: ![]()
30
--------------
(s+10) (s+0.2)
![]()
![]()
![]()
45 src="images/referats/5444/image005.png">,
Где ![]()
![]()
Рассчитать параметры:
1) непрерывной SS-модели
2) дискретной tf и zpk-модели
3) дискретной SS-модели
4) составить программу расчёта
Реферат
Пояснительная записка содержит 33 листов формата А4, 8 рисунков, 5 источников.
НЕПРЕРЫВНЫЕ СТРУКТУРИРОВАННЫЕ МОДЕЛИ, НЕПРЕРЫВНЫЕ МОДЕЛИ ПРОСТРАНСТВА СОСТОЯНИЯ, ДИСКРЕТНЫЕ СТРУКТУРИРОВАННЫЕ МОДЕЛИ, ДИСКРЕТНЫЕ МОДЕЛИ ПРОСТРАНСТВА СОСТОЯНИЯ.
В процессе работы производятся расчеты параметров непрерывной SS-модели, дискретной tf и zpk-модели, дискретной SS-модели.
Содержание
Введение
1.Непрерывные структурированные модели
2.Непрерывные модели пространства состояния
3.Дискретные структурированные модели
4.Дискретные модели пространства состояния
5.Расчет
5.1 Расчет непрерывной SS-модели
5.2 Расчет дискретной tf и zpk-модели
5.3 Расчет дискретной SS-модели
5.4 Расчет составить программу расчёта
Список использованных источники
Введение
Реальные объекты управления представляют собой совокупность отдельных элементов и блоков соединенных между собой посредством связей. Поэтому в практике гораздо удобнее бывает представлять математическую модель всей системы, как совокупность относительно простых математических моделей отдельных элементов и блоков объекта, т.е. структурированную модель. Такая форма математического описания отражает не только физические, но и технические принципы построения системы управления и позволяет исследовать процессы происходящие не только в системе в целом, но и процессы в отдельных ее элементах.
Математическая модель (образ) представляет собой абстрактное отражение реального объекта (оригинала, прообраза). В зависимости от типа объекта и целей, ради которых строится и используется модель, формальное описание может быть различным. Для моделирования объектов могут быть использованы структурные схемы, операторные уравнения, алгебраические уравнения, дифференциальные, интегральные и интегро-дифференциальные уравнения, Марковские цепи, передаточные функции, частотные характеристики, весовые функции, графы и т. д. Наиболее полно объект описывается в терминах пространства состояний. Под состоянием объекта понимается совокупность величин xi, полностью определяющих его положение в данный момент времени.
1. Непрерывные структурированные модели
Структурированные модели, учитывающие техническую организацию систем управления, создаются на основе следующих допущений:
1. Все элементы системы являются простейшими звеньями, т.е. имеют один вход и один выход. Если звено характеризуется несколькими обобщенными координатами, то в качестве выходной величины выбирается та координата, которая является выходной или регулируемой величиной звена.
2. Все звенья, из которых состоит система, является детектирующими. В детектирующем звене выходная величина зависит только от входной. Если выходная величина звена оказывает влияние на входную, то звено называется недетектирующим.
Допущения о том, что в состав системы управления должны входить только детектирующие звенья не сужает область применения структурированных моделей, так как недетектирующее звено может рассматривать как совокупность детектирующих звеньев охватываемых обратной связью.
Таким образом, структурированная модель системы управления разбивается на ряд взаимосвязанных математических моделей отдельных звеньев. Тогда, последовательно, исключая из рассмотрения все внутренние переменные, являющиеся входными или выходными сигналами внутренних звеньев, можно найти дифференциальное уравнение описывающее взаимосвязь входной и выходной величины системы в виде.
 , (1.1)
, (1.1)
где ![]() - постоянные коэффициенты; n - порядок системы.
- постоянные коэффициенты; n - порядок системы.
![]() Для реальных физически реализуемых систем управления m < n .
Для реальных физически реализуемых систем управления m < n .
Подвергая (1.1) преобразованию Лапласа при нулевых начальных условиях получим алгебраическое уравнение, связывающее изображения по Лапласу от входной X(p) и выходной Y(p) величины объекта
![]() , (1.2)
, (1.2)
где p – оператор Лапласа
Последнее уравнение можно представить в виде:
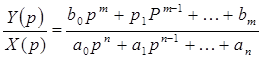 . (1.3)
. (1.3)
Это отношение называется передаточной функцией объекта и обозначается символом W(p).
Передаточной функцией системы называется отношение выходной величины к входной, преобразованных по Лапласу при нулевых начальных условиях и возмущениях.
Зная передаточную функцию системы или звена можно легко получить дифференциальное уравнение в форме (1.1), справедливо также и обратное утверждение. Введение векторных переменных при рассмотрении многомерных объектов позволяет для линейных систем использовать привычный аппарат передаточных функций и структурных схем, однако понятие передаточной функции значительно расширяется.
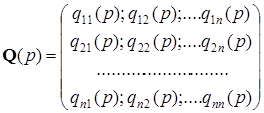
Пусть имеется многомерный объект управления. По аналогии с одномерными системами (1.2) можно записать:
![]() , (1.4)
, (1.4)
где Q(p)-квадратная матрица операторных коэффициентов размера ![]()
 ,
,
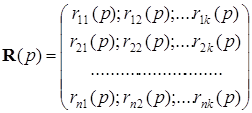
R(p)- прямоугольная матрица операторных коэффициентов размера ![]()
 ,
,
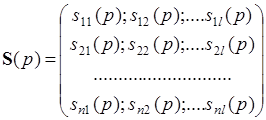
S(p)- прямоугольная матрица операторных коэффициентов размера ![]()
 .
.
Для получения системы дифференциальных уравнений необходимо перемножить прямоугольную или квадратную матрицы на матрицы - столбцы соответствующих переменных объекта.
Взаимосвязь уравнений состояния с уравнениями системы в виде (1.4) определяется из следующих соотношений. Выразим переменную ![]() через
через ![]()
![]() (1.5)
(1.5)
и подставим это выражение
Другие рефераты на тему «Экономико-математическое моделирование»:
- Статистические методы оценки социально-экономических показателей
- Основы экономического анализа
- Методы оценки параметров распределения
- Применение методов линейного программирования для оптимизации стоимости перевозок
- Построение двухфакторной модели, моделей парной линейной прогрессии и множественной линейной регрессии
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели