Дифференциальная геометрия торсов в пространстве 1R4 с псевдоевклидовой касательной плоскостью
 |
Таким образом, получена теорема.
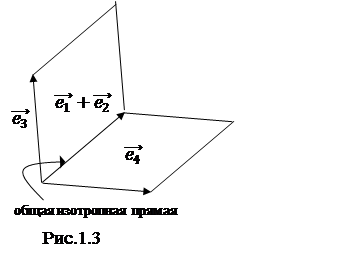
Теорема 1.1. В пространстве 1R4 существуют следующие типы прямых, плоскостей и 3-плоскостей:
- прямые: R1, 1R1,=24 height=28 src="images/referats/11804/image087.png">.
- 2-плоскости: R2, 1R2,![]() .
.
- 3-плоскости: R3, 1R3,![]() .
.
§2. Кривые в пространстве 1R4
В пространстве 1R4 выберем базис
![]() ,
,
где![]() Точка MÎ1R4, имеющая в репере R координаты (
Точка MÎ1R4, имеющая в репере R координаты (![]() ): M(
): M(![]() )R.
)R.
Определение 2.1. Кривой в пространстве 1R4 называется множество точек этого пространства, координаты которых задаются уравнениями:
![]() (6)
(6)
Или в векторном виде ![]() . (7)
. (7)
Определение 2.2. Функция, имеющая непрерывные производные до k-го порядка включительно на отрезке [a,b], называется k раз дифференцируемой функцией на этом отрезке.
Определение 2.3. Кривая g называется дифференцируемой класса Сk, если функции (6), задающие параметрические уравнения, являются k раз дифференцируемыми функциями.
Пусть кривая g является кривой класса C3. Рассмотрим на дифференцируемой кривой g вектора:
![]()
![]() .
.
Определение 2.4. Точка M, принадлежащая кривой g, называется неособой, если в этой точке вектора ![]()
![]() ,
, ![]() линейно независимы. В противном случае точка M кривой g называется особой.
линейно независимы. В противном случае точка M кривой g называется особой.
Определение 2.5. Прямая ![]() называется касательной к кривой в точке M, 2-плоскость
называется касательной к кривой в точке M, 2-плоскость ![]() называется соприкасающейся плоскостью кривой g, 3-плоскость
называется соприкасающейся плоскостью кривой g, 3-плоскость ![]() называется соприкасающейся 3-плоскостью кривой g в точке M.
называется соприкасающейся 3-плоскостью кривой g в точке M.
Очевидно, ![]() Ì
Ì![]() Ì
Ì![]() .
.
Теорема 2.1. Кривая g имеет в каждой точке касательную и притом единственную.
Если r=r(t) - векторное уравнение кривой, то касательная в точке Р, соответствующей значению параметра t, имеет направление вектора r'(t).
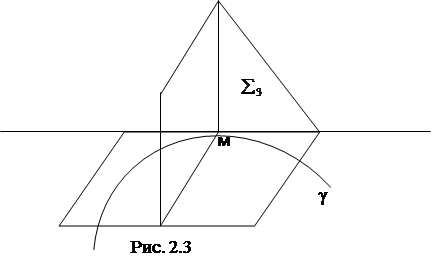
Теорема 2.2. Кривая g имеет в каждой точке соприкасающуюся плоскость. При этом соприкасающаяся плоскость либо единственная, либо любая плоскость, содержащая касательную к кривой, является соприкасающейся.
Если r=r(t) – уравнение кривой g, то соприкасающаяся плоскость в точке, соответствующей значению параметра t, параллельна векторам r'(t) и r''(t).
Теорема 2.3. Задание касательной, соприкасающейся плоскости и соприкасающейся 3-плоскости корректно, т.е. не зависит от параметризации кривой.
Для доказательства достаточно перейти к новому параметру и сравнить направляющие вектора.
![]()
![]()
![]()
![]()
![]()
![]()
Определение 2.5. Соприкасающийся флаг – это совокупность, состоящая из точки кривой, касательной к кривой в этой точке, соприкасающейся 2-плоскости к кривой в этой точке и соприкасающейся 3-плоскости к кривой в этой точке. [M, ![]() ], M Ì
], M Ì![]() Ì
Ì![]() Ì
Ì![]() .
.
Соприкасающийся флаг может быть следующих видов.
10. {M, R1, R2, R3}. Например, ![]()
20. {M, R1, 1R2, 1R3}. Например, ![]()
30. {M, R1, ![]() , 1R3}. Например,
, 1R3}. Например, ![]()
40. {M, R1, ![]() ,
, ![]() }. Например,
}. Например, ![]()
50. {M, 1R1, 1R2, 1R3}. Например, ![]()
60. {M, ![]() ,
, ![]() , 1R3}. Например,
, 1R3}. Например, ![]()
70. {M, ![]() ,
, ![]() ,
, ![]() }. Например,
}. Например, ![]()
80. {M, R1, R2, 1R3}. Например, ![]()
90. {M, R1, R2, ![]() }. Например,
}. Например, ![]()
100. {M, ![]() , 1R2, 1R3}. Например,
, 1R2, 1R3}. Например, ![]()
Более подробно в своей дипломной работе я рассмотрю кривые, имеющие соприкасающийся флаг вида 20.
Рассмотрим кривую g с соприкасающимся флагом 20.
Построим в произвольной точке M кривой g канонический репер {M, e1, e2, e3, e4}.
Введем на кривой g естественную параметризацию s следующим образом:
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах