Теоретические основы математических и инструментальных методов экономики
1. Задаются координаты начальной точки х[0].
2. В точке х[k], k = 0, 1, 2, . вычисляется значение градиента f’(x[k]).
3. Определяется величина шага ak, путем одномерной минимизации по а функции j(a) = f(x[k] - af'(x[k])).
4. Определяются координаты точки х[k+1]:
хi[k+1] = xi[k] – аkf’i(х[k]), i = 1 , ., п.
5. Проверяются условия останова стерационного процесса. Если они выпо
лняются, то вычисления прекращаются. В противном случае осуществляется переход к п. 1.
В рассматриваемом методе направление движения из точки х[k] касается линии уровня в точке x[k+1] (Рис. 2.9). Траектория спуска зигзагообразная, причем соседние звенья зигзага ортогональны друг другу. Действительно, шаг ak выбирается путем минимизации по а функции φ(a) = f(x[k] - af'(x[k])). Необходимое условие минимума функции dj(a)/da = 0. Вычислив производную сложной функции, получим условие ортогональности векторов направлений спуска в соседних точках:
dj(a)/da = -f’(x[k+1]f’(x[k]) = 0.
Градиентные методы сходятся к минимуму с высокой скоростью (со скоростью геометрической прогрессии) для гладких выпуклых функций. У таких функций наибольшее М и наименьшее m собственные значения матрицы вторых производных (матрицы Гессе)
мало отличаются друг от друга, т. е. матрица Н(х) хорошо обусловлена. Напомним, что собственными значениями li, i =1, …, n, матрицы являются корни характеристического уравнения
Однако на практике, как правило, минимизируемые функции имеют плохо обусловленные матрицы вторых производных (т/М << 1). Значения таких функций вдоль некоторых направлений изменяются гораздо быстрее (иногда на несколько порядков), чем в других направлениях. Их поверхности уровня в простейшем случае сильно вытягиваются, а в более сложных случаях изгибаются и представляют собой овраги. Функции, обладающие такими свойствами, называют овражными. Направление антиградиента этих функций (см. Рис. 2.10) существенно отклоняется от направления в точку минимума, что приводит к замедлению скорости сходимости.
Метод сопряженных градиентов
Рассмотренные выше градиентные методы отыскивают точку минимума функции в общем случае лишь за бесконечное число итераций. Метод сопряженных градиентов формирует направления поиска, в большей мере соответствующие геометрии минимизируемой функции. Это существенно увеличивает скорость их сходимости и позволяет, например, минимизировать квадратичную функцию
f(x) = (х, Нх) + (b, х) + а
с симметрической положительно определенной матрицей Н за конечное число шагов п , равное числу переменных функции. Любая гладкая функция в окрестности точки минимума хорошо аппроксимируется квадратичной, поэтому методы сопряженных градиентов успешно применяют для минимизации и неквадратичных функций. В таком случае они перестают быть конечными и становятся итеративными.
По определению, два n-мерных вектора х и у называют сопряженными по отношению к матрице H (или H-сопряженными), если скалярное произведение (x, Ну) = 0. Здесь Н - симметрическая положительно определенная матрица размером пхп.
Одной из наиболее существенных проблем в методах сопряженных градиентов является проблема эффективного построения направлений. Метод Флетчера-Ривса решает эту проблему путем преобразования на каждом шаге антиградиента -f(x[k]) в направление p[k], H-сопряженное с ранее найденными направлениями р[0], р[1], ., р[k-1]. Рассмотрим сначала этот метод применительно к задаче минимизации квадратичной функции.
Направления р[k] вычисляют по формулам:
p[k] = -f’(x[k])+bk-1p[k-l], k >= 1;
p[0] = -f’(x[0]).
Величины bk-1 выбираются так, чтобы направления p[k], р[k-1] были H-сопряженными:
(p[k], Hp[k-1])= 0.
В результате для квадратичной функции
![]() ,
,
итерационный процесс минимизации имеет вид
x[k+l] =x[k] +akp[k],
где р[k] - направление спуска на k-м шаге; аk - величина шага. Последняя выбирается из условия минимума функции f(х) по а в направлении движения, т. е. в результате решения задачи одномерной минимизации:
f(х[k] + аkр[k]) = ![]() f(x[k] + ар [k]).
f(x[k] + ар [k]).
Для квадратичной функции
![]()
Алгоритм метода сопряженных градиентов Флетчера-Ривса состоит в следующем.
1. В точке х[0] вычисляется p[0] = -f’(x[0]).
2. На k-м шаге по приведенным выше формулам определяются шаг аk. и точка х[k+1].
3. Вычисляются величины f(x[k+1]) и f’(x[k+1]).
4. Если f’(x[k+1]) = 0, то точка х[k+1] является точкой минимума функции f(х). В противном случае определяется новое направление p[k+l] из соотношения
![]()
и осуществляется переход к следующей итерации. Эта процедура найдет минимум квадратичной функции не более чем за п шагов. При минимизации неквадратичных функций метод Флетчера-Ривса из конечного становится итеративным. В таком случае после (п+1)-й итерации процедуры 1-4 циклически повторяются с заменой х[0] на х[п+1] , а вычисления заканчиваются при ![]() , где
, где ![]() - заданное число. При этом применяют следующую модификацию метода:
- заданное число. При этом применяют следующую модификацию метода:
x[k+l] = x[k] +akp[k],
p[k] = -f’(x[k])+bk-1p[k-l], k >= 1;
p[0] = -f’(x[0]);
f(х[k] + akp[k]) = ![]() f(x[k] + ap[k];
f(x[k] + ap[k];
 .
.
Здесь I- множество индексов: I = {0, n, 2п, Зп, .}, т. е. обновление метода происходит через каждые п шагов.
Геометрический смысл метода сопряженных градиентов состоит в следующем (Рис. 2.11). Из заданной начальной точки х[0] осуществляется спуск в направлении р[0] = -f'(x[0]). В точке х[1] определяется вектор-градиент f'(x [1]). Поскольку х[1] является точкой минимума функции в направлении р[0], то f’(х[1]) ортогонален вектору р[0]. Затем отыскивается вектор р [1], H-сопряженный к р [0] . Далее отыскивается минимум функции вдоль направления р[1] и т. д.
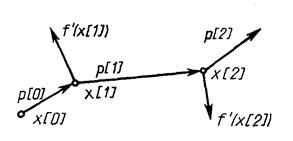
Рис. 2.11. Траектория спуска в методе сопряженных градиентов
Методы сопряженных направлений являются одними из наиболее эффективных для решения задач минимизации. Однако следует отметить, что они чувствительны к ошибкам, возникающим в процессе счета. При большом числе переменных погрешность может настолько возрасти, что процесс придется повторять даже для квадратичной функции, т. е. процесс для нее не всегда укладывается в п шагов.
Выпуклая оптимизация. Условие выпуклости. Субградиентный метод выпуклой оптимизации. Метод растяжения пространства. Метод эллипсоидов.
Основная задача выпуклого программирования
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели