Проектирование автоматической системы управления температурным режимом печи пиролиза П-101 установки получения технического водорода
· требуемую подачу вещества или энергии в объект управления.
Система автоматизации, обеспечивающая выполнение задачи регулирования с учетом особенностей объекта и технологического процесса, изображена на рисунке 4.2.
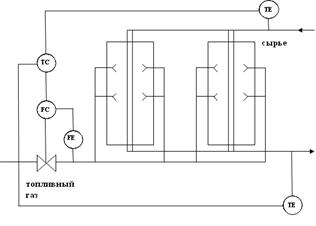
Рис. 4.2. Схема автоматизации объекта.
В соответствии с постав
ленной в дипломном проекте задачей произведем структурный синтез двухконтурной каскадно-связанной АСР. АСР, подлежащая синтезу, изображена на рисунке 4.3.
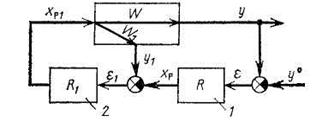
Рис. 4.3. Структурная схема каскадно-связанной АСР, поддерживающей требуемую температуру продукта на выходе из печи П-101.
Выбранная система регулирования, включает два регулятора – основной (внешний) регулятор, служащий для стабилизации основного выхода объекта ![]() , и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты
, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты ![]() . В такой системе выходной сигнал одного из регуляторов направляется на другой в качестве задания.
. В такой системе выходной сигнал одного из регуляторов направляется на другой в качестве задания.
4.3 Расчет одноконтурных АСР
Для расчета АСР, необходима математическая модель объекта управления, т.е. уравнения, которые описывают процессы, происходящие в системе, поэтому, исходными данными для расчетов АСР, послужили результаты исследований объекта раздела "Идентификация объекта управления".
Структурная схема одноконтурной АСР имеет вид:
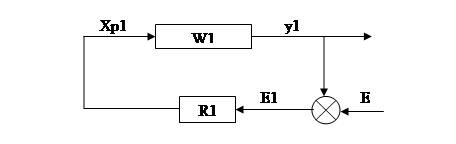
Рис. 4.4. Структурная схема одноконтурной АСР.
4.3.1 Расчет одноконтурной АСР температуры на выходе печи.
Произведем расчет оптимальных настроек регулятора одноконтурной АСР температуры на выходе в прикладной программе LinRegTV:
Настройки ПИ-регулятора (метод Ротача):
· ![]()
· ![]()
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() .
.
АЧХ одноконтурной АСР температуры на выходе печи представлены ниже (см. также Приложение Г):
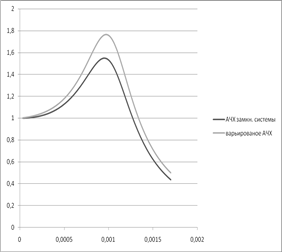
Рис. 4.5. АЧХ одноконтурной АСР температуры на выходе печи.
Расчет оптимальных настроек регулятора, работающего по ПИ-алгоритму, произведен методом Ротача:
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() .
.
4.3.2 Расчет одноконтурной АСР расхода топливного газа
Произведем расчет оптимальных настроек регулятора одноконтурной АСР расхода топливного газа в прикладной программе LinRegTV:
Настройки ПИ-регулятора (метод Ротача):
· ![]()
· ![]()
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() .
.
АЧХ одноконтурной АСР расхода топливного газа представлены ниже (см. также Приложение Д):
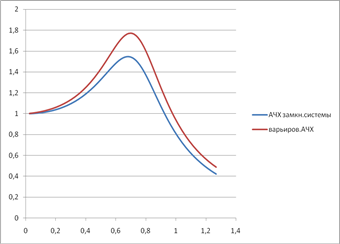
Рис. 4.6. АЧХ одноконтурной АСР расхода топливного газа.
Расчет оптимальных настроек регулятора, работающего по ПИ-алгоритму, произведен методом Ротача:
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() ;
;
· ![]() .
.
Поскольку основной целью дипломного проекта является поддержание и стабилизация температуры на выходе печи, то мы рассмотрим только переходные процессы изменения данной температуры в зависимости от величины задания и возмущения.
Ниже на рисунках показано, как смоделированные нами одноконтурные системы регулирования температуры отрабатывают 5% задание и возмущение.
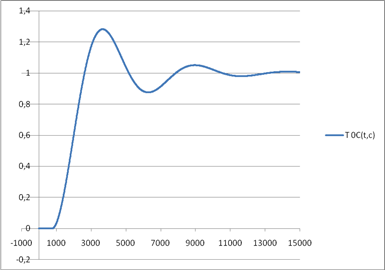
Рис. 4.7. Выход АСР температуры продукта при отработке задания.

Рис. 4.8. Выход АСР температуры продукта при отработке возмущения.
На рисунке 4.9 изображена модель одноконтурной АСР температуры в пакете Simulink программы MATLAB.
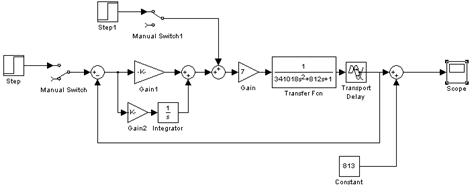
Рис. 4.9. Модель одноконтурной АСР температуры продукта на выходе печи.
Для повышения качества регулирования необходим переход от одноконтурной АСР к более сложной системе. Такая система кроме обычного стандартного регулятора содержит вспомогательное устройство – дополнительный регулятор. В качестве более сложной АСР возьмем каскадную систему, так как один из объектов обладает большей инерционностью по каналу регулирования по отношению к другому объекту.
4.4 Расчет каскадной АСР
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования включают два регулятора — основной (внешний) регулятор, служащий для стабилизации основного выхода объекта уi, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты уi. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
Выбор законов регулирования определяется назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую; от вспомогательного регулятора требуется прежде всего быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Другие рефераты на тему «Производство и технологии»:
- Проект участка приготовления сахарного сиропа производственной мощностью 1500 тонн в год
- Обезжелезивание природных вод
- Планирование технико-экономических показателей в производстве хлебобулочных изделий на линии с ведущим оборудованием – печью ФТП–2–60
- Обеспечение производственной и экологической безопасности производстве этилена
- Коробка подач радиально-сверлильного станка
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды