Проектирование автоматической системы управления температурным режимом печи пиролиза П-101 установки получения технического водорода
Передаточную функцию устройства ввода воздействия от возмущения целесообразно выбирать в виде:
![]() (4.3)
(4.3)
Рассчитаем устройство ввода компенсирующего воздействия.
Возмущение по температуре топочных газов на перевале подается на вход эквивалентного объекта:
 (4.4)
(4.4)
Структурная схема комбинированной системы управления в Simulink представлена на рисунке 4.17.
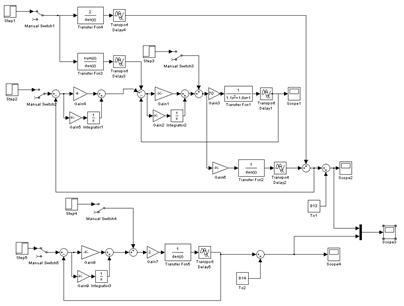
Рис. 4.18. Модель комбинированной АСР.
Сравним работу комбинированной с одноконтурной системой по каналу внешнего возмущения.
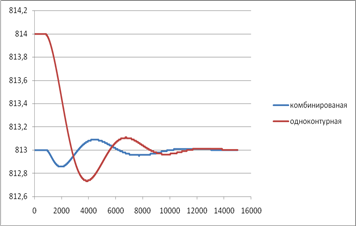
Рис. 4.18. Выход комбинированной и одноконтурной систем при отработке внешнего возмущения.
Таблица 4.2. Сравнение одноконтурной и комбинированной АСР температуры.
|
Режим работы |
По возмущению | |
|
АСР |
Одноконтурная |
Комбинированная |
|
Время регулирования T, c |
7790 |
5360 |
|
Степень затухания y |
0,83 |
0,95 |
|
Максимальный выброс, ºС |
1 |
0,09 |
Из анализа рисунка 4.18 видно, что комбинированная система надежно отрабатывает внешние возмущения. Выброс и время регулирования в системе с компенсатором меньше, чем в системе без него.
4.7 Расчет и моделирование системы с учетом нелинейностей
При реализации АСР на реальном объекте на качество переходного процесса влияют нелинейности ТСА. Принимая во внимание эту особенность, необходимо смоделировать АСР с учетом таких нелинейностей.
Для моделирования системы с учетом нелинейностей необходимо знать зону нечувствительности датчиков, используемых на объекте, а также люфт исполнительного устройства (клапана).
1) Термопара YOKOGAWA CH тип Кс нормирующим преобразователем YTA310: класс точности равен 0,5%, рабочая температура- 850 оС
![]()
2) Для измерения расхода пара и исходного газа выберем Вихревой расходомер Digital YEWFLO фирмы Yokogawa:
![]()
3)ИМ: люфт 0,05.
Приблизим полученные модели к реальным условиям, т.е. подадим возмущения, наложим случайные помехи на сигнал возмущения и учтем нелинейность элементов. Тогда модели примут следующий вид – рисунки 4.20, 4.21.
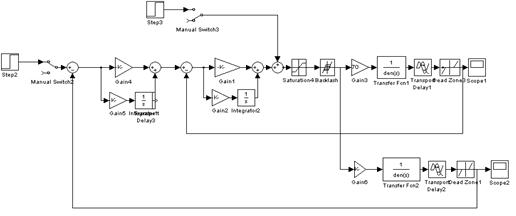
Рис. 4.20. Модель каскадной АСР температуры продукта с учетом нелинейностей.
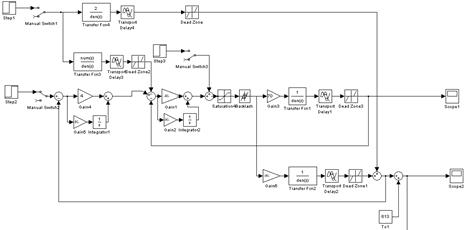
Рис. 4.21. Модель комбинированной АСР температуры продукта с учетом нелинейностей.
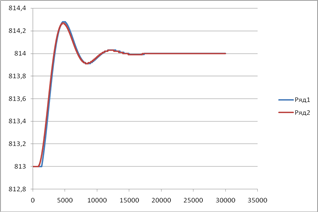
Рис. 4.22. Выход АСР температуры с нелинейностями и без нелинейностей по каналу задания.
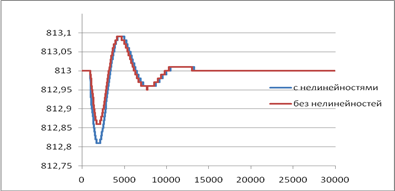
Рис. 4.23. Выход АСР температуры с нелинейностями и без нелинейностей по каналу внешнего возмущения.
4.8 Реализация системы управления
Смоделированную систему управления предлагается реализовать в распределенной системе управления CS-3000 фирмы Yokogawa.
Обычно, при конфигурировании используется следующая последовательность разработки:
1. Сначала принимаются общие концептуальные решения, которые относятся к системе в целом и ко всему объекту.
2. Переход на следующий уровень детализации системы, на котором принимаются решения о логическом представлении системы в виде областей. Области являются логическими составляющими представления системы управления процессом. Они могут соответствовать как конкретным аппаратам системы, так и основным технологическим функциям.
3. На следующем уровне детализации системы в областях выделяются модули, управляющие элементами оборудования. Разработчик может использовать уже существующие модули из библиотеки в качестве отправной точки для создания модулей, необходимых для реализации стратегии управления.
В системе используется модульный принцип при разработке стратегии управления. Управляющие модули являются уникальными поименованными управляющими единицами. Они содержат группу логически взаимосвязанных системных объектов и имеют имя – тег. Обычно, управляющие модули представляют управляющее оборудование технологического процесса, такое, как клапаны, задвижки, насосы, мешалки и т. д.
Функциональные блоки – это основные компоненты управляющего модуля, то есть, это блоки, из которых строится управляющая модель. Каждый функциональный блок содержит в себе управляющий алгоритм (такой как ПИД, Аналоговый Выход или Аналоговый Вход). Будучи соединенными вместе, в определенной последовательности, несколько функциональных блоков образуют управляющую модель.
Задание параметров функциональных блоков.

![]()
На рис. 4.8.1 показана схема управления температурным режимом печи П-101.

Рис. 4.8.1
4.9 Выводы
В ходе выполнения данного раздела было выполнено следующее:
1. Рассчитаны и смоделированы одноконтурные системы регулирования по каналам температуры на выходе печи П-101, расхода топливного газа. Получены оптимальные настройки ПИ регуляторов.
2. Рассчитана и смоделирована каскадная система регулирования температуры на выходе печи. Установлено, что каскадная САР, по сравнению с одноконтурной, практически мгновенно ликвидирует внутренние возмущающие воздействия.
3. Для уменьшения влияния внешних возмущений на систему была рассчитана и смоделирована комбинированная схема регулирования (каскадная система с компенсацией по расходу сырья в печи).
4. При реализации CAP на реальном объекте на качество переходного процесса влияют нелинейности ТСА, принимая во внимание эту особенность, была смоделирована CAP, учитывающая нелинейности используемых ТСА.
5. Реализован алгоритм регулирования температуры в распределенной системе управления CS-3000 фирмы Yokogawa.
5. Выбор и анализ комплекса средств автоматизации
5.1 Характеристика используемых средств автоматизации
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды