Методы компьютерных вычислений и их приложение к физическим задачам
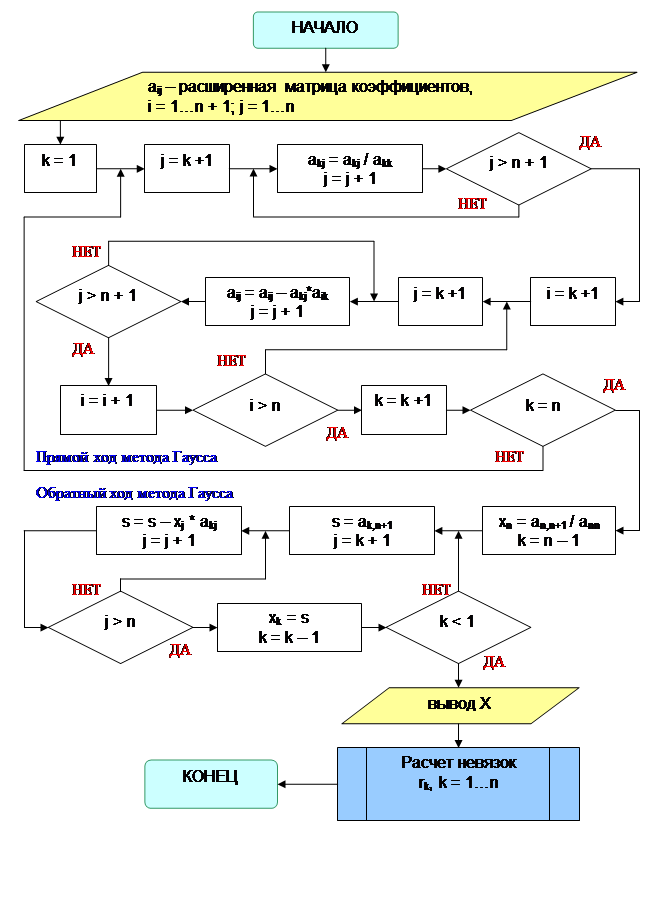
Блок-схема алгоритма метода Гаусса без выбора главного элемента.
Итерационные методы решения систем линейных уравнений.
Простейшим итерационным методом решения СЛАУ является метод простой итерации. При этом система уравнений ![]() (1) преобразуется к в
(1) преобразуется к в
иду ![]() (2), а ее решение находится как предел последовательности
(2), а ее решение находится как предел последовательности ![]() (3), где {n} – номер итерации. Утверждается, что всякая система (2), эквивалентная (1), записывается в виде
(3), где {n} – номер итерации. Утверждается, что всякая система (2), эквивалентная (1), записывается в виде ![]() .
.
Теорема о достаточном условии сходимости метода простой итерации утверждает, что если норма матрицы ![]() (
( ), то система уравнений (2) имеет единственное решение и итерационный процесс (3) сходится к решению со скоростью геометрической прогрессии.
), то система уравнений (2) имеет единственное решение и итерационный процесс (3) сходится к решению со скоростью геометрической прогрессии.
Теорема о необходимом и достаточном условии сходимости метода простой итерации: Пусть система (2) имеет единственное решение. Итерационный процесс (3) сходится к решению системы (2) при любом начальном приближении тогда и только тогда, когда все собственные значения матрицы ![]() по модулю меньше 1.
по модулю меньше 1.
На практике для обеспечения сходимости итерационных методов необходимо, чтобы значения диагональных элементов матрицы СЛАУ были преобладающими по абсолютной величине по сравнению с другими элементами.
Представим СЛАУ в следующей форме, удовлетворяющей (3):
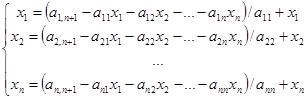 (4)
(4)
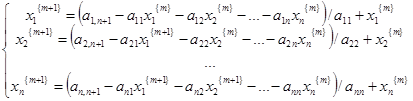
Зададим начальные приближения ![]() и вычислим правую часть (4), получим новые приближения
и вычислим правую часть (4), получим новые приближения ![]() , которые опять подставим в систему (4). Таким образом организуется итерационный процесс, который обрывается по условию
, которые опять подставим в систему (4). Таким образом организуется итерационный процесс, который обрывается по условию ![]() , где
, где ![]() – заданная погрешность.
– заданная погрешность.
К ускорению сходимости приводит использование приближения к решениям путем последовательного уточнения компонентов, причем k-я неизвестная находится из k-го уравнения. Такая модификация итерационного метода носит название метода Зейделя:
Критерий сходимости метода Зейделя: Пусть ![]() – вещественная симметричная положительно определенная матрица. Тогда метод Зейделя сходится.
– вещественная симметричная положительно определенная матрица. Тогда метод Зейделя сходится.
Достоинствами метода простых итераций является простота программной реализации и более быстрый, по сравнению с линейными методами, поиск решения в матрицах большого размера. Недостатками являются сложный контроль условий сходимости и выбора начального приближения.
8)Интерполирование функций.
1) Необходимость: приблизить f(x) более простой функцией ф(х), совпадающей в узлах xi с f(xi), если f(x) определена только в узловых точках (результат эксперимента) или очень сложно вычисляется.
Условия Лагранжа : ф(х, с0, с1…сn) = fi,
0 <_i < n, где сi - свободные параметры, определяемые из данной системы уравнений.
С помощью интерполяции решают широкий круг задач численного анализа: дифференцирование и интегрирование функций, нахождение нулей и экстремумов, решение дифференцированных и т. д. Термин интерполяция употребляют, если х заключено между узлами, если он выходит за крайний узел, говорят об экстраполяции(при которой трудно гарантировать надежность
приближения).
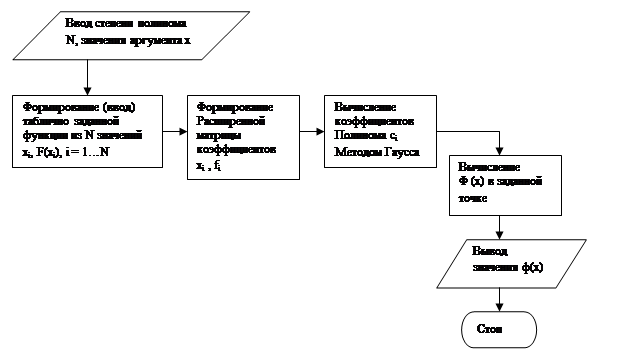
2) Пусть ф (х) = с0 + с1х + с2х2 +…+ сnxn (канонический вид полинома) ;сетка узлов может быть неравномерной.
Коэффициенты сi определяются из условий Лагранжа:
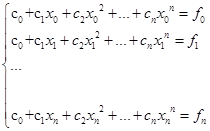
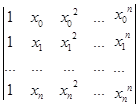
Получившаяся СЛАУ относительно свободных параметров сi имеет решение, если среди узлов хi нет совпадающих.Ее определитель – определитель Вандермонда:
Общая блок-схема:
3) Пусть задано n+1 значение функции f(x) в узлах xj
ф(х) = Pn(х) = ![]() i
i ![]() (x-xj)/(xi-xj) - полином Лагранжа.
(x-xj)/(xi-xj) - полином Лагранжа.
Преимущества: потребуется решать СЛАУ для определения значения полинома в точке х.
Недостатки: для каждого х полином требуется читать заново.
Погрешность формулы:![]() (*)
(*)
Увеличение числа узлов и, соответственно, степени полинома Pn(x) ведет к увеличению погрешности из-за роста производных ![]() .
.
4) ф(х) = Pn(x) = A0+A1(x-x0)+A2(x-x0)(x-x1)+…+An(x-x0)(x-x1)…(x-xn-1) - многочлен Ньютона для n+1 узла.
Коэффициенты Ф представляют собой разделенные разности и записываются в виде:
А0 = f0
A1 = (f0-f1)/(x0-x1) = f01
A2 = (f01-f02)/(x1-x2) = f012, где f02 = (f0-f2)/(x0-x2)
A3 = (f012-f013)/(x2-x3) = f0123 , где f013 = (f01-f03)/(x1-x3) , а f03 = (f0-f3)/(x0-x3)
и в общем случае Ak = (f01…k-1-f01…k)/(xk-1-xk)
Т.е. многочлен n-й степени выражается при помощи разделенных разностей через свои значения в узлах.
Преимущества: не решается СЛАУ, однако вычисление коэффициентов полинома не зависит от значения х и может быть вычислено только один раз. При добавлении нового узла также не происходит пересчета коэффициентов, кроме последнего.
После определения коэффициентов полинома Ньютона вычисление его значений при конкретных аргументах х наиболее экономично проводить по схеме Горнера:
P2(x) = A0+ (x-x0)(A1+(x-x2)(A3+…)…)
Погрешность определяется тем же соотношением (*)
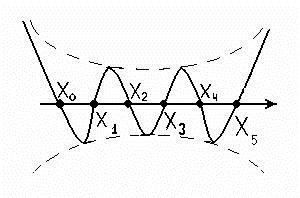
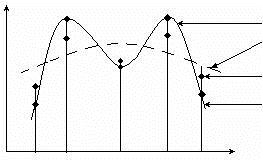
Входящая в состав погрешности величина
![]() (х-хi) = wn(x) ведет себя при постоянном шаге так, как показано на рисунке. Многочлен Ньютона имеет погрешность 0(hn+1) и обеспечивает n+1-й порядок точности интерполяции.
(х-хi) = wn(x) ведет себя при постоянном шаге так, как показано на рисунке. Многочлен Ньютона имеет погрешность 0(hn+1) и обеспечивает n+1-й порядок точности интерполяции.
! Между разделенными разностями и производными соответствующих порядков существует соотношение f <n>(x) ~ n! F01…n , где n – степень производной. Это используется в численном дифференцировании и при оценке погрешностей интерполяции.
! Можно строить полиномы, не только проходящие через заданные точки, но и имеющие в них заданные касательные (интерполяционный многочлен Эрмита) или заданную кривизну. Количество всех полагаемых условий должно быть n-1, если n – степень полинома.
Другие рефераты на тему «Математика»:
Поиск рефератов
Последние рефераты раздела
- Анализ надёжности и резервирование технической системы
- Алгоритм решения Диофантовых уравнений
- Алгебраическое доказательство теоремы Пифагора
- Алгоритм муравья
- Векторная алгебра и аналитическая геометрия
- Зарождение и создание теории действительного числа
- Вероятностные процессы и математическая статистика в автоматизированных системах