Система автоматического управления регулируемым электроприводом
3.3 Оценка качества регулирования в различных режимах работы
Согласно рассчитанным параметрам САУ РЭП с помощью программы MatLab строим переходные процессы по току и скорости при пуске (рисунок 3.3.1), торможении, набросе и снятии нагрузки (рисунок 3.3.2).
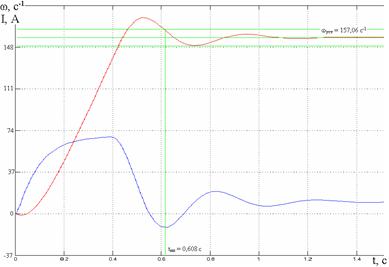
Рисунок 3.3.1 – Графики переходных процессов при пу
ске привода
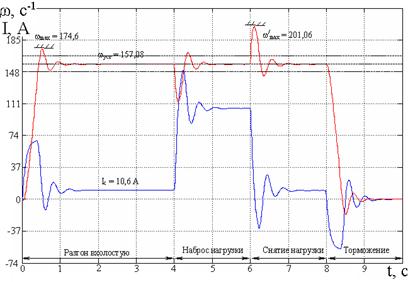
Рисунок 3.3.2 – Переходные процессы в САУ РЭП при пуске, торможении, набросе и снятии нагрузки
Из графика (рисунки 3.3.1 и 3.3.2) определяем:
1) время переходного процесса: tпп = 0,608 с;
2) перерегулирование:
- при пуске:
![]() ;
;
- при набросе нагрузки:
 .
.
3) статическая погрешность:
![]() ,
,
![]() .
.
Полученные значения показателей динамики САУ РЭП свидетельствуют о том, что в целом система соответствует заданным требованиям устойчивости и точности.
4. Расчет цифрового электропривода (ЦЭП)
4.1 Определение периода дискретного времени управления в ЦЭП
Проектирование средств сопряжения микропроцессорной системы с объектом связано с определением конкретных величин, обеспечивающих требуемые показатели работы цифрового электропривода (ЦЭП) по точности и быстродействию, которые зависят от периода дискретности Т0 времени управления в ЦЭП.
Существует несколько способов определения периода дискретности [4], которые выбираются, исходя из заданных требований к качеству работы привода:
1) для электропривода с тиристорным преобразователем:
![]() ,
,
где m – число фаз системы питания;
fс – частота питающей сети, ![]() ,
,
![]() ;
;
2) по порядку астатизма:
![]()
где ![]() - порядок астатизма,
- порядок астатизма, ![]() ;
;
![]() - допускаемая ошибка,
- допускаемая ошибка, ![]() ;
;
а – линейное ускорение:
![]() ,
,
r – радиус тела вращения, ![]() ;
;
![]() - заданное угловое ускорение,
- заданное угловое ускорение, ![]() ,
,
![]() ;
;
![]() ;
;
3) по требуемой точности:
![]()
где ![]() – порядок экстраполяции для данного цифрового электропривода,
– порядок экстраполяции для данного цифрового электропривода,
![]() .
.
Ориентируясь на минимальное значение, выбираем ![]() .
.
4.2 Составление функциональной и структурной схемы ЦЭП
ЦЭП включает в себя следующие функциональные элементы:
- вычислительное устройство (на базе микропроцессора или микроконтроллера, МП), выполняющее функцию сумматора и реализующее алгоритм цифрового регулирования (ЦР);
- цифро-аналоговый преобразователь (ЦАП) – фиксатор (экстраполятор нулевого порядка);
- аналоговая часть – исходный регулируемый электропривод (РЭП) с контурами тока и скорости.
Функциональная схема ЦЭП показана на рисунке 4.2.1.

Рисунок 4.2.1 – Функциональная схема ЦЭП
В соответствии с функциональной схемой составляем структурную схему ЦЭП (рисунок 4.2.2). Вычислительное устройство представлено на ней блоком суммирования и передаточной функцией регулятора D(z), которую в последствии необходимо определить, исходя из требований устойчивости и повышения точности работы привода. Неизменяемая часть ЦЭП описывается произведением передаточных функций ЦАП, который на структурной схеме обозначен передаточной функцией фиксатора
![]() ,
,
и аналоговой системы ![]() :
:
![]() .
.
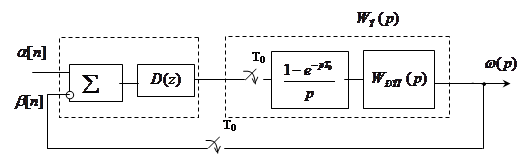 Рисунок 4.2.2 – Структурная схема ЦЭП
Рисунок 4.2.2 – Структурная схема ЦЭП
Структурная схема ЦЭП в дискретной форме представлена на рисунке 4.2.3. Дискретная передаточная функция фиксатора на ней представлена в виде ![]() .
.
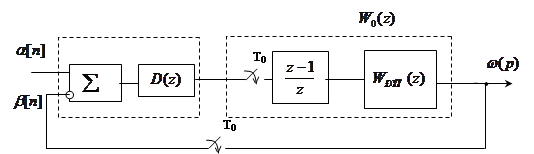 Рисунок 4.2.3 – Структурная схема ЦЭП в дискретной форме
Рисунок 4.2.3 – Структурная схема ЦЭП в дискретной форме
4.3 Синтез регулятора в ЦЭП
4.3.1 Составление дискретной передаточной функции неизменяемой части ЦЭП
Чтобы упростить математическое описание процессов, происходящих в электрических цепях тиристорного преобразователя и якорной цепи, рассмотрим их совместно, выразив одной передаточной функцией формирователя тока [5]:
![]() ,
,
где ![]() - коэффициент передачи по току;
- коэффициент передачи по току;![]()
![]() - относительная длительность импульса тока (
- относительная длительность импульса тока (![]() );
);
![]() - целое число периодов дискретности
- целое число периодов дискретности ![]() , на которое запаздывает импульс тока относительно времени подачи управляющего сигнала (
, на которое запаздывает импульс тока относительно времени подачи управляющего сигнала (![]() );
);
![]() - дробная часть периода дискретности
- дробная часть периода дискретности ![]() , характеризующая величину запаздывания импульса тока (
, характеризующая величину запаздывания импульса тока (![]() ).
).
В дальнейших расчетах принимаем ![]() ,
, ![]() ,
, ![]() .
.
Передаточная функция оставшейся механической части двигателя:
![]() ,
,
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Измерения при защите кабелей от коррозии
- Антенная решетка из рупорно-линзовых антенн с электрическим качанием луча
- Изучение принципа действия стабилитрона, освоение методики расчета схемы параметрического стабилизатора напряжения
- Структурная схема системы слежения за временным положением. Обобщенные функциональная и структурная схемы радиотехнических следящих систем
- Физические основы действия высокочастотных колебаний на ткани организма
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем