Система автоматического управления регулируемым электроприводом
![]() - индуктивность дополнительных полюсов,
- индуктивность дополнительных полюсов,
![]() – коэффициент индуктивности для некомпенсированных машин,
– коэффициент индуктивности для некомпенсированных машин, ![]() – число пар полюсов,
– число пар полюсов,
![]() – номинал
– номинал
ьная угловая скорость двигателя,
![]() .
.
Активное сопротивление сглаживающего дросселя:
![]() .
.
Расчетное активное сопротивление цепи якоря:

где ![]() - сопротивление проводников.
- сопротивление проводников.
Предельный угол регулирования:
![]() ,
,
где ![]() - скорость вращения электродвигателя, соответствующая нижнему пределу его регулирования:
- скорость вращения электродвигателя, соответствующая нижнему пределу его регулирования:
![]() ,
,
где ![]() - заданный диапазон регулирования;
- заданный диапазон регулирования;
Конструктивная постоянная двигателя:
![]() .
.
Таким образом,
![]() .
.
По полученному значению ![]() определяем
определяем ![]() [1].
[1].
Индуктивность сглаживающего дросселя:
![]()
где ![]() - относительная величина эффективного значения первой гармоники выпрямленного напряжения;
- относительная величина эффективного значения первой гармоники выпрямленного напряжения;
![]() – коэффициент схемы: для трехфазной мостовой схемы
– коэффициент схемы: для трехфазной мостовой схемы ![]() ;
;
![]() - относительная величина эффективного значения пульсаций первой гармоники выпрямленного тока;
- относительная величина эффективного значения пульсаций первой гармоники выпрямленного тока;
![]() - угловая скорость первой гармоники выпрямленного напряжения,
- угловая скорость первой гармоники выпрямленного напряжения,
![]() .
.
Расчетная индуктивность якорной цепи:
![]() ,
,
![]() .
.
Электромагнитная постоянная времени:
![]() .
.
Электромеханическая постоянная времени:
![]() ,
,
где J - момент инерции привода.
1.4 Построение статических характеристик тиристорного преобразователя
Регулировочная характеристика преобразователя при условном холостом ходе может быть построена по следующему выражению:
![]() ;
;
![]() .
.
Зависимость напряжения на якоре электродвигателя в функции угла регулирования преобразователя при неизменном (номинальном) моменте на валу может быть определена с помощью уравнения
![]() ;
;
![]() ;
;
![]() .
.
где (Rт+Rп) - внутреннее сопротивление источника питания.
Расчетные значения для графического представления характеристик приведены в таблице 1.4, графики – на рисунке 1.4.1.
Таблица 1.4 – Результаты расчета характеристик
|
|
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
|
351 |
345,7 |
329,8 |
304 |
268,9 |
225,6 |
175,5 |
120 |
60,95 |
0 |
|
|
343,4 |
338,1 |
322,2 |
296,4 |
268,3 |
218 |
167,9 |
112,4 |
53,34 |
- |
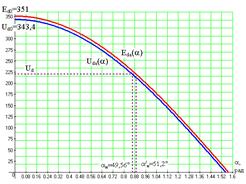
Рисунок 1.4.1 – Регулировочные характеристики преобразователя при условном холостом ходе Еdα=f(α) и номинальной нагрузке электродвигателя Udα=f(α)
Начальный (минимальный) угол регулирования:
![]() ,
,
![]() .
.
Динамический запас по напряжению:
![]() .
.
Характеристика “вход - выход” преобразователя ЕТП=f (UУ) строится по известной регулировочной характеристике системы управления тиристорами ![]() = f (UУ) (рисунок 1.2) и по регулировочной характеристике Ed= f (
= f (UУ) (рисунок 1.2) и по регулировочной характеристике Ed= f (![]() ) (рисунок 1.1) путем последовательного перестроения.
) (рисунок 1.1) путем последовательного перестроения.
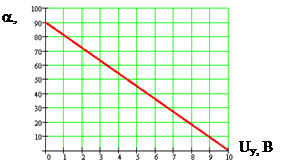
Рисунок 1.4.2 – Зависимость ![]() = f (UУ) преобразователя
= f (UУ) преобразователя
Общий вид зависимости EТП = f (UУ) приведен на рисунке 1.4.3.
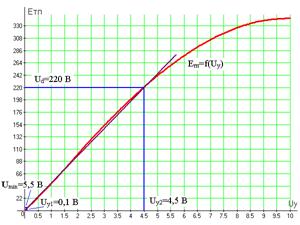
Рисунок 1.4.3 – Характеристика “вход - выход” преобразователя ЕТП=f (UУ)
Значение ![]() определяем исходя из заданного диапазона регулирования:
определяем исходя из заданного диапазона регулирования:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем