Система автоматического управления регулируемым электроприводом
Воспользовавшись формулой
![]() ,
,
перейдем в дискретную область:


![]()
4.3.3Определение дискретной передаточной функ
ции регулятора
Зная дискретные передаточные функции желаемой системы и исходной системы, можно найти дискретную передаточную функцию регулятора из отношения
![]() .
.
В результате мы получим выражение, не менее, чем третьей степени, не очень удобное для программной реализации и дальнейшей настройки, поэтому в качестве регулятора будем использовать типовой ПИД-регулятор, коэффициенты которого определяются на основе параметров, рассчитанных в пункте 4.3.2.
Дискретная передаточная функция ПИД-регулятора описывается выражением:
![]() ,
,
где ![]() - коэффициент пропорциональной составляющей регулятора:
- коэффициент пропорциональной составляющей регулятора:
![]()
![]() ;
;
![]() - коэффициент интегральной составляющей регулятора:
- коэффициент интегральной составляющей регулятора:
![]() ;
;
![]()
![]() - коэффициент дифференциальной составляющей регулятора:
- коэффициент дифференциальной составляющей регулятора:
![]()
![]() .
.
Таким образом, передаточная функция ПИД-регулятора:
![]() .
.
4.4 Оценка качества регулирования в ЦЭП
Для анализа динамики ЦЭП используем Matlab. Структурная схема САУ ЦЭП с ПИД-регулятором приведена на рисунке 4.4.1, а реакция ее на ступенчатое воздействие – на рисунке 4.4.2.
Из графика (рисунок 4.4.2) определяем:
1) время переходного процесса: tпп = 0,106 с;
2) перерегулирование:
![]() .
.
3) статическая погрешность:
![]() .
.
Таким образом, введение цифрового контура позволило улучшить динамические характеристики привода в сравнении с исходной системой.
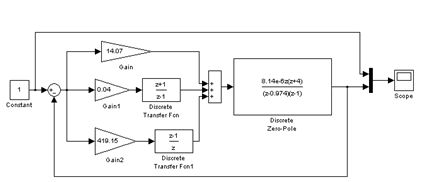
Рисунок 4.4.1 – Структурная схема САУ ЦЭП с ПИД-регулятором
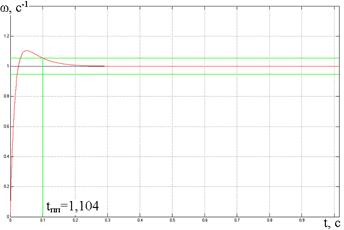
Рисунок 4.4.2 – Переходной процесс в САУ ЦЭП
4.5 Выбор цифровых датчиков и средств сопряжения микроконтроллера (МК) с измерительными преобразователями и исполнительными органами
В настоящее время в цифровых системах находят практическое применение четыре основных типа устройств измерения скорости вращения [9]:
1) С помощью импульсных преобразователей, на выходе которых частота следования импульсов пропорциональна измеряемой скорости вращения. В основе построения подобных измерителей лежат различные принципы генерации импульсов, например фотоэлектрический, индукционный и др.
2) С помощью кварцевого генератора генерируются импульсы, а схемно обеспечивается измерение количества этих импульсов за промежуток времени между двумя импульсами от тахогенератора.
3) С помощью аналоговых тахогенераторов с последующим преобразованием напряжения тахогенератора в тот или иной цифровой код.
4) С использованием специальных фазовых преобразователей, а также сельсинов или вращающихся трансформаторов, работающих в режиме фазовращателя, с последующим преобразованием информации, заключенной в фазе напряжения, в сигнал, пропорциональный измеряемой скорости вращения.
Воспользуемся комбинированным способом измерения скорости в цифровом контуре, предложенным в источнике [10], когда для уменьшения доли мощности микро-ЭВМ, расходуемой на выполнение операций по измерению скорости, счет импульсов и измерение временных интервалов производится - аппаратно, а управление счетом и вычисление скорости по данным счетчика и значению периода измерения Тф – программно.
Структурная схема измерения углового перемещения показана на рисунке 4.5.1. Процесс измерения синхронизируется импульсами RST_CT и SYS_IN. По сигналу RST_CT с датчика синхронизации очищаются счетчики импульсов и взводится триггер Т. Счетчик СТ1 начинает счет импульсов эталонного генератора Г. При равенстве двоичного числа на выходе СТ1 заданному значению Тф устройство сравнения кодов — компаратор К выдает импульс, устанавливающие триггер Т в нулевое положение. В процессе же счета временного интервала на выходе взведенного триггера установлена логическая единица, открывающая доступ импульсов от импульсного датчика углового перемещения на вход счетчика СТ2.
Информация от счетчика СТ2 по сигналу SYNC_IN переписывается в буферный регистр БР. Следом за SYNC_IN внешнее устройство вырабатывает импульс RST_CT и процесс измерения углового перемещения повторяется. В интервале времени между импульсами RST_CT н SYNC_IN микро-ЭВМ обращается к буферному регистру, считывает записанную в нем информацию и вычисляет среднее значение скорости.
Величина Тф вводится в аппаратную часть с помощью микро-ЭВМ.
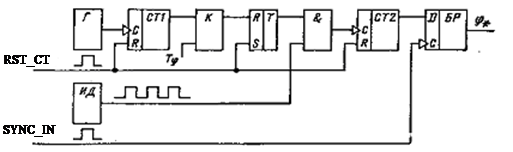 Рисунок 4.5.1 – Структурная схема блока счета импульсов датчика углового перемещения
Рисунок 4.5.1 – Структурная схема блока счета импульсов датчика углового перемещения
Для реализации устройства, показанного на рисунке 4.8 используются следующие стандартные ИМС: двоичные счетчики К155ИЕ5, компаратор кода 134СП1, RS-триггер К155ТР2, регистр К555ИР23, логические элементы К155ЛИ1, К155ЛА3.
В качестве измерительного устройства используем импульсный датчик угловых перемещений типа ROD-428 c частотой считывания до 300 кГц, он имеет повышенную ударо- и вибростойкость, средства подавления паразитных сигналов. Uпит =5 В, D х L - 0 58 х 72, мм присоединительный вал Ø 6 мм.
Для преобразования кода регулируемого в ЦЭП параметра в аналоговый сигнал используем восьмиразрядный быстродействующий АЦП типа К1118ПА3.
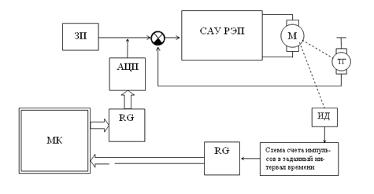
Структурная схема ЦЭП с устройствами сопряжения приведена на рисунке 4.5.2.
 |
5. Сравнение качества регулирования аналоговой и цифровой САУ ЭП
В результате введения цифрового контура в САУ РЭП удалось улучшить динамические характеристики системы. Так, время, за которое достигается установившееся значение выходной величины, в аналоговом РЭП составляет 0,608 с, а в ЦЭП оно уменьшается до 0,106 с. Также удалось уменьшить перерегулирование с 11,1% до 10,4%. Причем, в случае с ЦЭП получен чистый апериодический процесс, без каких-либо колебаний.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Проектирование радиоэлектронных средств с помощью ЭВМ
- Генераторы, шифраторы, дешифраторы диспетчерской централизации
- Эксплуатация и технология измерений систем Е1
- Оценка параметрической надежности РЭС с использованием моделирования на ЭВМ постепенных отказов
- Автоматизация и диспетчеризация систем электроснабжения
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем