Система автоматического управления регулируемым электроприводом
Задание
на курсовое проектирование студенту Гашину И.А. гр. АПП 00-2
Вариант 3
Таблица 0.1 - Исходные данные для проектирования РЭП
|
Параметр |
Значение | |||
|
P, кВт |
8 | |||
|
Iн, А |
43,5 | |||
|
Uн, B |
220 | |||
|
nн, об/мин |
1500 | |||
|
КПД, % |
81 | |||
|
Rя, Ом |
0,27 | |||
|
Rдп, Ом |
0,2 | |||
|
Jдв, кг×м2 |
0,1 | |||
|
Jпр, кг×м2 |
3,5 Jдв | |||
|
Диапазон регулирования скорости |
40 | |||
|
Допустимое угловое ускорение, e, с-2 |
1900 | |||
|
Допустимая статическая погрешность, sРЭП, % |
9 | |||
|
Схема соединения |
|
Реферат
Курсовой проект содержит 22 рисунка, 7 таблиц, 10 ссылок, 4 листа формата А1 графической части.
Объект проектирования – система автоматического управления регулируемым электроприводом.
Цель работы – спроектировать силовую часть привода, статические и динамические режимы автоматизированного электропривода с аналоговой и цифровой системой управления.
В данном курсовом проекте:
- произведен расчет силовой части привода с выбором трансформатора и тиристоров;
- рассчитаны необходимые статические характеристики тиристорного преобразователя и выбран стандартный КТП;
- определены естественные и искусственные электромеханические характеристики привода при различных режимах питания;
- определены параметры регуляторов и датчиков обратных связей;
- исследованы динамические характеристики РЭП;
- осуществлен синтез цифрового контура системы управления электроприводом;
- выбраны средства сопряжения аналогового РЭП с микроконтроллерной системой управления и цифровой датчик скорости.
РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД, ЗАДАТЧИК ИНТЕНСИВНОСТИ, УПОРНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА, ПЕРИОД ДИСКРЕТНОСТИ, ТЕХНИЧЕСКИЙ ОПТИМУМ, ИМПУЛЬСНЫЙ ДАТЧИК, СРЕДСТВА СОПРЯЖЕНИЯ.
Содержание
Введение
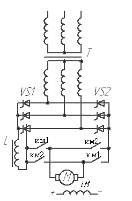
1. Расчет и выбор источника питания для ЭП на базе комплектного тиристорного преобразователя
1.1 Расчет и выбор силового трансформатора
1.2 Расчет и выбор тиристоров для силовых вентильных блоков комплектного преобразователя. Выбор схемы соединения вентильных блоков
1.3 Определение параметров якорной цепи электропривода
1.4 Построение статических характеристик тиристорного преобразователя
1.5 Выбор и краткое описание комплектного тиристорного преобразователя
2. Статические режимы работы САУ ЭП
2.1 Построение естественной электромеханической характеристики (при питании от сети) и характеристики в разомкнутой системе (при питании от ТП)
2.2 Составление расчетной функциональной схемы РЭП
2.3 Расчет задатчика интенсивности
2.4 Построение упорной электромеханической характеристики РЭП в замкнутой системе
2.5 Расчет и выбор регуляторов скорости и тока и их нелинейных звеньев
3. Динамика САУ РЭП
3.1 Составление структурной схемы в соответствии с заданным порядком астатизма и функциональным назначением электропривода
3.2 Расчет переходных процессов в РЭП
3.2.1 Составление дифференциальных уравнений в форме Коши и уравнений связи
3.2.2 Составление таблицы исходных расчетных данных для реализации стандартных программ построения переходных процессов в РЭП
4. Расчет цифрового электропривода – контура скорости в РЭП
4.1 Определение периода дискретного времени управления в цифровом электроприводе
4.2 Составление функциональной и структурной схем цифрового электропривода
4.3 Синтез регулятора скорости в цифровом электроприводе на основе технического оптимума
4.4 Составление дискретной передаточной функции оптимального регулятора в соответствующем контуре
4.4.1 Составление дискретной передаточной функции замкнутой САУ РЭП по замкнутым звеньям
4.4.2 Составление дискретной передаточной функции замкнутой САУ РЭП по желаемой передаточной функции
4.5 Выбор цифровых датчиков скорости
4.6 Выбор средств сопряжения микропроцессора с измерительными преобразователями и исполнительными органами
4.7 Расчет переходных процессов по скорости в относительных единицах методом разложения в ряд Лорана
Введение
Все приводы в металлорежущих станках классифицируются по видам движения: приводы главного движения, приводы подачи, приводы вспомогательных движений. Электропривод главного движения имеет электродвигатель и коробку скоростей или редуктор в качестве устройства, передающего движения исполнительному органу станка. Типовая кинематическая схема электропривода главного движения приведена на рисунке 0.1.
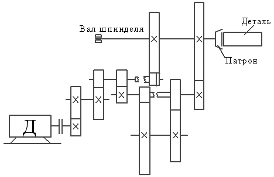
Рисунок 0.1 – Кинематическая схема привода главного движения
До недавнего времени наиболее распространенными приводами главного движения станков были приводы от одно- и многоскоростных асинхронных двигателей с короткозамкнутым ротором со ступенчатым механическим регулированием скорости путем переключения шестерен коробки скоростей. Но использование электропривода переменного тока со ступенчатым механическим регулированием скорости не может во всех случаях обеспечить требуемую производительность. Кроме ого применение коробки скоростей со сложной кинематикой снижает точность работ станка и увеличивает его стоимость. Поэтому основным направлением развития приводов главного движения является электромеханическое регулирование частоты вращения привода при двухступенчатой коробке скоростей с дистанционным переключением и регулируемым электроприводом [2].
Для приводов главного движения наиболее рациональным является способ регулирования скорости с постоянной мощностью, так как большим скоростям резания соответствуют меньшие усилия резания, и наоборот.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем