Разработка контроллера шагового двигателя
1.1.2 Разработка и отладка аппаратных средств
После разработки структуры аппаратных и программных средств дальнейшая работа над контроллером может быть распараллелена. Разработка аппаратных средств включает в себя разработку общей принципиальной схемы, разводку топологии плат, монтаж макета и его автономную отладку. На этапе ввода принципиальной схемы и разработки топологии использую
тся, как правило, распространенные системы проектирования типа «ACCEL EDA» или «OrCad».
1.1.3 Разработка и отладка программного обеспечения
Содержание этапов разработки программного обеспечения, его трансляции и отладки на моделях существенно зависит от используемых системных средств. В настоящее время ресурсы 8-разрядных МК достаточны для поддержки программирования на языках высокого уровня. Это позволяет использовать все преимущества структурного программирования, разрабатывать программное обеспечение с использованием раздельно транслируемых модулей. Одновременно продолжают широко использоваться языки низкого уровня типа ассемблера, особенно при необходимости обеспечения контролируемых интервалов времени. Задачи предварительной обработки данных часто требуют использования вычислений с плавающей точкой, трансцендентных функций.
В настоящее время самым мощным средством разработки программного обеспечения для МК являются интегрированные среды разработки, имеющие в своем составе менеджер проектов, текстовый редактор и симулятор, а также допускающие подключение компиляторов языков высокого уровня типа Паскаль или Си. При этом необходимо иметь в виду, что архитектура многих 8-разрядных МК вследствие малого количества ресурсов, страничного распределения памяти, неудобной индексной адресации и некоторых других архитектурных ограничений не обеспечивает компилятору возможности генерировать эффективный код.
1.2 Принципы работы шагового двигателя
Существуют два основных типа шаговых двигателей, применяемых в практике:
• с постоянным магнитом;
• с переменным магнитным полем.
Конструкция типичного биполярного шагового двигателя показана на рис. 1.2.
Двигатели с постоянным магнитом бывают биполярными (рис. 1.3) и униполярными (рис. 1.4).
Биполярные двигатели – наиболее простые для решения несложных задач. Они состоят из постоянного магнита вращающегося ротора и окруженного полюсами статора, состоящего из четырех обмоток. Протекание тока в обмотках статора возбуждает ротор, и при последовательной коммутации обмоток происходит ступенчатое вращение.
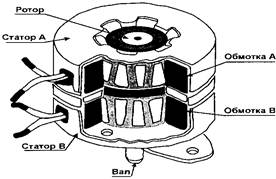
Рисунок 1.2 – Конструкция биполярного шагового двигателя
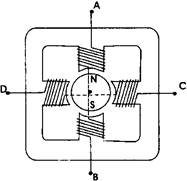
Рисунок 1.3 – Схема биполярного двигателя
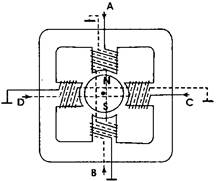
Рисунок 1.4 – Схема униполярного двигателя
Для двигателя этого типа существует три метода возбуждения обмоток.
• Возбуждение обмоток происходит в последовательности AB/CD/ BA/DC (ВА указывает на то, что обмотка АВ возбуждается в противоположном направлении). Эта последовательность известна под названием «одна фаза активна», «полный шаг» или «привод волны». В каждый момент возбуждается только одна из фаз (рис. 1.5).
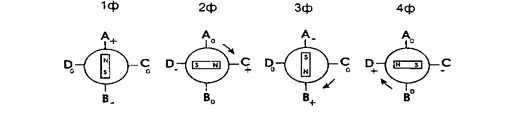
Рисунок 1.5 – Последовательность возбуждения обмоток «одна фаза активна»
• Возбуждение одновременно обеих фаз, чтобы ротор выровнялся между двумя положениями полюса. Такой метод называется «две фазы активны», «полный шаг». Это состояние является следующей последовательностью привода биполярного двигателя и дает самый высокий вращающий момент (рис. 1.6).
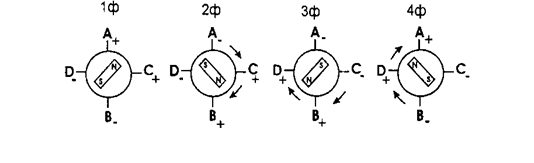 |
Рисунок 1.6 – Последовательность возбуждения обмоток «две фазы активны»
Для вращения в противоположном направлении (синхронизация прежняя) изменяется порядок возбуждения обмоток, на противоположный. Как показано на диаграммах, угол поворота ротора составляет 90°. Промышленные двигатели имеют больше полюсов и достигают угла поворота в несколько градусов, но число обмоток и последовательность привода остаются неизменными.
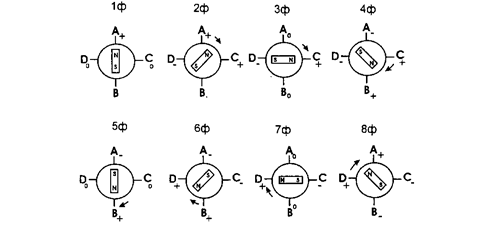
Рисунок 1.7 – Последовательность возбуждения обмоток «ступенчатый метод половины»
Униполярный двигатель с постоянным магнитом идентичен биполярному за тем исключением, что у него в каждой фазе используются две обмотки. Это необходимо для того, чтобы полностью изменить поток статора быстрее, чем в двунаправленном приводе (рис. 1.8).
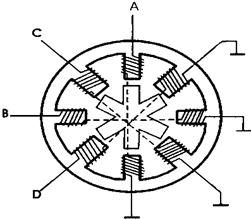
Рисунок 1.8 – Схема униполярного двигателя с постоянным магнитом
Ротор выполняет тот же путь, что и у биполярного двигателя за тем исключением, что мостовые драйверы заменены простыми униполярными каскадами: четыре транзистора Дарлингтона, или счетверенные транзисторные матрицы Дарлингтона.
Униполярные двигатели более дорогостоящие, поскольку у них – вдвое больше обмоток. Кроме того, их характеризует гораздо меньший вращающий момент при одинаковых габаритах, так как обмотки выполнены из более тонкого провода. Все двигатели с постоянным магнитом генерируют электромагнитные помехи ротором, который ограничивает скорость вращения. При очень высоких скоростях вращения необходим двигатель с переменным магнитным полем.
Двигатель переменного магнитного поля оснащен ротором из нена-магниченного мягкого железа с меньшим количеством полюсов, чем статор (рис. 1.8). При этом используется униполярный метод возбуждения пары полюсов статора, чтобы повернуть ротор к полюсам возбуждаемой обмотки ступенчато. Здесь также используют три различных последовательности возбуждения фаз:
• «одна фаза активна» – A/C/B/D;
• «две фазы активны» – AC/CB/BD/DA;
• «шаг-половина» – A/AC/C/BC/B/BD/D/DA.
Заметим, что угол поворота ротора составляет 15°, а не 45°. В прошлом униполярные двигатели были более интересны для проектировщиков, поскольку имеют простой выходной каскад. Теперь, когда выпускаются монолитные драйверы напряжения, биполярные двигатели становятся более популярным.
Для правильного генерирования импульса обмотки ШД необходим мостовой коммутатор тока обмотки. Такой коммутатор можно собрать на дискретных элементах.
2. Разработка контроллера шагового двигателя робота
2.1 Постановка задачи
Требуется разработать схему контролера шагового двигателя робота.
Разработка устройства велась с учётом следующих требований:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Физические основы работы светоизлучающих диодов
- Расчет сети IP-телефонии - трафик, задержка, маршрутизатор
- Цифровые системы передачи телефонных сигналов
- Усилительный каскад на биполярном транзисторе
- Разработка функциональной цифровой ячейки от функциональной логической схемы проектируемого узла до печатной платы узла
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем