Разработка контроллера шагового двигателя
Рисунок 2.3 – Структурная схема микроконтроллера AT90S2313
Благодаря выполнению высокопроизводительных инструкций за один период тактового сигнала, AT90S2313 достигает производительности, приближающейся к уровню 1 MIPS на МГц, обеспечивая разработчику возможность оптимизировать уровень энергопотребления в соответствии с необходимой вычислительной производительностью.
Ядро AVR содержит м
ощный набор инструкций и 32 рабочих регистра общего назначения. Все 32 регистра напрямую подключены к арифметико – логическому устройству (АЛУ), что обеспечивает доступ к двум независимым регистрам при выполнении одной инструкции за один такт. В результате, данная архитектура имеет более высокую эффективность кода, при повышении пропускной способности, вплоть до 10 раз, по сравнению со стандартными микроконтроллерами CISC.
AT90S2313 имеет: 2 Кбайт Flash – памяти с поддержкой внутрисистемного программирования, 128 байт EEPROM, 15 линий I/O общего назначения, 32 рабочих регистра общего назначения, универсальные таймеры/ счетчики с режимами сравнения, внутренние и внешние прерывания, программируемый UART последовательного типа, программируемый следящий таймер с встроенным тактовым генератором и программируемый последовательный порт SPI для загрузки программ в Flash память, а также, два программно выбираемых режима экономии энергопотребления. Режим ожидания «Idle Mode» останавливает CPU, но позволяет функционировать SRAM, таймеру/ счетчикам, SPI порту и системе прерываний. Режим экономии энергопотребления «Power Down» сохраняет значения регистров, но останавливает тактовый генератор, отключая все остальные функции микроконтроллера, вплоть до следующего внешнего прерывания, или до аппаратной инициализации.
Устройство производится с применением технологи энергонезависимой памяти с высокой плотностью размещения, разработанной в корпорации Atmel. Встроенная Flash – память с поддержкой внутрисистемного программирования обеспечивает возможность перепрограммирования программного кода в составе системы, посредством SPI последовательного интерфейса, или с помощью стандартного программатора энергонезависимой памяти. Благодаря совмещению усовершенствованного 8-ми разрядного RISC CPU с Flash – памятью с поддержкой внутрисистемного программирования на одном кристалле получился высокопроизводительный микроконтроллер AT90S2313, обеспечивающий гибкое и экономически – высокоэффективное решение для многих приложений встраиваемых систем управления.
AVR AT90S2313 поддерживается полным набором программ и пакетов для разработки, включая: компиляторы С, макроассемблеры, отладчики/ симуляторы программ, внутрисхемные эмуляторы и наборы для макетирования.
2.4 Разработка функциональной схемы устройства
Функциональная схема контролера шагового двигателя робота изображена на рисунке 2.4.
|
![]() +U
+U
| |||
![]()
![]()
![]()
![]()
![]()
|
|

Рисунок 2.4 – Функциональная схема контролера шагового двигателя робота
2.5 Разработка алгоритма управления
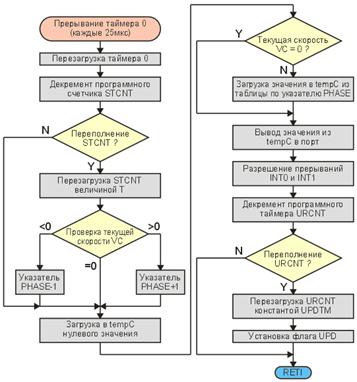
Рисунок 2.5 – Основной алгоритм контролера шагового двигателя робота
2.6 Разработка программного обеспечения микроконтроллера
Главной задачей программы является формирование импульсных последовательностей для 4-х обмоток двигателя. Поскольку для этих последовательностей временные соотношения являются критичными, формирование выполняется в обработчике прерывания таймера 0. Можно сказать, основную работу программа делает именно в этом обработчике. Алгоритм работы обработчика приведен на рисунке 2.5.
Несомненно, было бы удобнее использовать таймер 1, так как он 16-разрядный и способен вызывать периодические прерывания по совпадению с автоматическим обнулением. Однако он занят формированием с помощью ШИМ опорного напряжения для компараторов. Поэтому приходится перезагружать таймер 0 в прерывании, что требует некоторой корректировки загружаемой величины и вызывает некоторый джиттер, который, однако, на практике не мешает. В качестве основной временной базы выбран интервал 25 мкс, который и формируется таймером. С такой дискретностью могут формироваться временные последовательности фаз, такой же период имеет и ШИМ стабилизации тока в фазах двигателя.
Для формирования периода повторения шагов используется программный 16-разрядный таймер STCNT. В отличие от таймера 0, его загрузочная величина не является константой, так как именно она определяет скорость вращения двигателя. Таким образом, переключение фаз происходит только при переполнении программного таймера.
Последовательность чередования фаз задана таблично. В памяти программ микроконтроллера имеются три разных таблицы: для полношагового режима без перекрытия фаз, полношагового с перекрытием и для полушагового режима. Все таблицы имеют одинаковую длину 8 байт. Нужная таблица в начале работы загружается в ОЗУ, что позволяет наиболее просто переходить между разными режимами работы двигателя. Выборка значений из таблицы происходит с помощью указателя PHASE, поэтому переключение направления вращения двигателя тоже осуществляется очень просто: для вращения вперед требуется инкрементировать указатель, а для вращения назад – декрементировать.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Разработка предложений по использованию населением информационно-телекоммуникационных услуг связи на примере Нижнекамского районного узла электрической связи
- Анализ современных технологий изготовления гибридных микросборок
- Радиопередатчик с частотной модуляцией
- Воздействие радиационного излучения на операционные усилители
- Программная и аппаратная часть автоматизированной сигнализации по GSM каналу
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем