Разработка контроллера шагового двигателя
Самая «главная» переменная в программе – это 24-битная знаковая переменная VC, которая содержит значение текущей скорости. Знак этой переменной определяет направление вращения, а значение – частоту следования шагов. Нулевое значение этой переменной говорит о том, что двигатель остановлен. Программа в этом случае выключает ток всех фаз, хотя во многих приложениях в этой ситуации требуется остави
ть включенными текущие фазы и лишь несколько уменьшить их ток, обеспечив этим удержание положения двигателя. При необходимости такое изменение логики работы программы сделать очень просто.
Таким образом, в случае переполнения программного таймера STCNT происходит анализ значения переменной VC, в случае положительного значения указатель PHASE инкрементируется, а в случае отрицательного – декрементируется. Затем из таблицы выбирается очередная комбинация фаз, которая выводится в порт. В случае нулевого значения VC указатель PHASE не изменяется, и в порт выводятся все нулевые значения.
Величина T, которой следует загружать таймер STCNT, однозначно связана со значением переменной VC. Однако перевод частоты в период занимает довольно много времени, поэтому эти вычисления производятся в основной программе, и не на каждом шаге, а гораздо реже. Вообще, эти вычисления нужно периодически производить только во время разгона или торможения. В остальных случаях скорость, и, соответственно, период повторения шагов, не меняются.
Для осуществления ШИМ-стабилизации тока фазы должны периодически включаться, а затем, при достижении током заданного уровня, выключаться. Периодическое включение производится в прерывании таймера 0, для чего даже в случае отсутствия переполнения программного таймера STCNT в порт выводится текущая комбинация фаз. Происходит это с периодом 25 мкс (что соответствует частоте ШИМ 40кГц). Выключением фаз управляют компараторы, выходы которых подключены к входам прерывания INT0 и INT1. Прерывания разрешаются после того, как ток фаз включается, и запрещаются сразу после переключения компараторов. Это исключает их повторную обработку. В обработчиках прерываний происходит только отключение соответствующих фаз (рисунок 2.6).

Рисунок 2.6 – Блок-схема обработчика прерываний INT0 и INT1
Процессы, происходящие при ШИМ-стабилизации тока, показаны на рисунке 2.7. Особо следует отметить, что ток в датчике тока имеет прерывистый характер даже в том случае, если ток обмотки не прерывается. Это связано тем, что во время спада тока его путь не проходит через датчик тока (а проходит через диод).
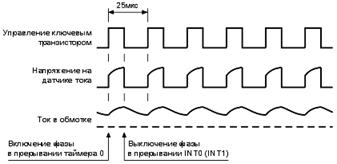
Рисунок 2.7 – Процесс ШИМ-стабилизации тока
Аналоговая часть системы ШИМ-стабилизации тока фаз двигателя является довольно «капризной». Дело в том, что сигнал, снимаемый с датчика тока, содержит большое количество помех. Помехи возникают в основном в моменты коммутации обмоток двигателя, причем как «своей», так и «чужой» фазы.
В данной программе периодичность вычисления новых значений скорости и периода выбрана равной 15.625 мс. Такое значение выбрано не случайно. Этот интервал составляет 1/64с, а главное, он содержит целое число периодов переполнения таймера 0 (25 мкс). Удобно, если значения скорости и ускорения задаются в естественных единицах, т.е. в шагах в секунду и в шагах, деленных на секунду в квадрате. Для того чтобы иметь возможность в целочисленной арифметике вычислять мгновенную скорость 64 раза в секунду, нужно перейти к внутреннему представлению скорости, увеличенному в 64 раза. Умножение и деление на 64 сводится к обычным сдвигам и поэтому требует очень мало времени. Заданную периодичность вычислений обеспечивает еще один программный таймер URCNT, который декрементируется в прерывании таймера 0 (раз в 25 мкс). Этот таймер всегда загружается постоянной величиной, что обеспечивает неизменный период его переполнений, равный 15.625 мс. При переполнении этого таймера устанавливается битовый флаг UPD, который сигнализирует основной программе, что «пора бы обновить значения скорости и периода».
Основная программа (рисунок 2.8) выполняет вычисление мгновенных значений скорости и периода следования шагов, обеспечивая необходимую кривую разгона. В данном случае разгон и торможение осуществляются с постоянным ускорением, поэтому скорость меняется линейно. Период при этом меняется по гиперболическому закону, и его вычисление – основная работа программы.
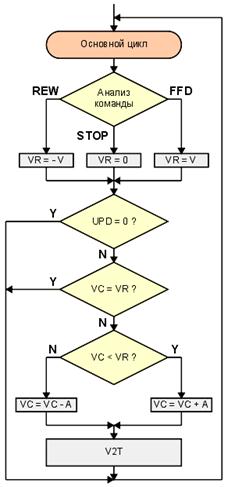
Рисунок 2.8 – Блок-схема основного цикла программы
Обновление значений скорости и периода следования шагов основная программа делает периодически, периодичность задается флагом UPD. Обновление программа делает на основе сравнения значений двух переменных: мгновенной скорости VC и требуемой скорости VR.
Значение требуемой скорости также определяется в основной программе. Это делается на основе анализа управляющих сигналов и сигналов с концевых выключателей. В зависимости от этих сигналов, основная программа загружает переменную VR значением требуемой скорости. В данной программе это V для движения вперед, – V для движения назад и 0 для остановки. В общем случае, набор скоростей (а также ускорений и токов фаз) может быть сколь угодно большим, в зависимости от требований.
Если скорости VC и VR равны, значит, шаговый двигатель работает в стационарном режиме и обновления не требуется. Если же скорости не равны, то значение VC с заданным ускорением приближается к VR, т.е. двигатель ускоряется (или замедляется) до достижения номинальной скорости. В случае, когда даже знаки VR и VC отличаются, двигатель замедляется, реверсируется и потом достигает требуемой скорости. Происходит это как бы само собой, благодаря структуре программы.
Если при очередной проверке обнаруживается, что скорости VR и VC не равны, то к значению VC прибавляется (или вычитается) значение ускорения A. Если в результате этой операции происходит превышение требуемой скорости, то полученное значение корректируется путем замены на точное значение требуемой скорости.
Затем происходит вычисление периода T (рисунок 2.9).
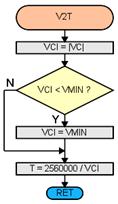
Рисунок 2.9 – Блок-схема подпрограммы вычисления периода
Вначале вычисляется модуль текущей скорости. Затем происходит ограничение минимальной скорости. Это ограничение необходимо по двум причинам. Во-первых, бесконечно малой скорости соответствует бесконечно большой период, что вызовет ошибку в вычислениях. Во-вторых, шаговые двигатели имеют довольно протяженную по скорости зону старта, поэтому нет необходимости стартовать на очень маленькой скорости, тем более что вращение на малых скоростях вызывает повышенный шум и вибрацию. Значение минимальной скорости VMIN должно выбираться исходя из конкретной задачи и типа двигателя. После ограничения минимальной скорости производится вычисление периода по формуле T = 2560000/|VC|. На первый взгляд формула не очевидна, но если учесть, что период необходимо получить в 25 мкс-интервалах, а внутреннее представление VC – это умноженное на 64 ее истинное значение, то все становится на свои места. При вычислении T требуется операция беззнакового деления формата 24/24, которое AVR на тактовой частоте 10МГц делает примерно за 70 мкс. Учитывая, что вычисления периода происходят не чаще, чем один раз в 15.625 мс, загрузка процессора получается очень низкой. Основную загрузку производит прерывание таймера 0, да и оно в основном выполняется по короткой ветке (без переполнения STCNT) длительностью примерно 3 мкс, что соответствует 12%-й загрузке процессора. Это означает, что имеются значительные резервы вычислительных ресурсов.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем