Система электронного управления магнитно-резонансного томографа
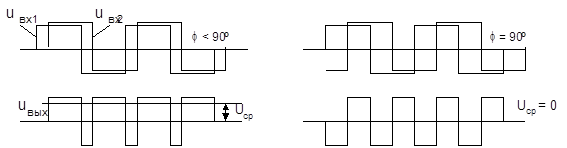
Регулятор фазы поддерживает точный сдвиг фаз в 90о между квадратурными сигналами с частотой f0. Это достигается применением АП (АП3) и фильтра нижних частот, в качестве которого используется интегратор. Выходное напряжение интегратора смещает потенциал на выходе фазосдвигающей цепи, которая представляет собой интегрирующую RC-цепь. В результате сдвигается во времени фронт импульса на входе одно
го из триггеров-делителей на 2. Регулятор охвачен обратной связью сигналами cosf0 и sinf0. В результате на выходе АП3 возникает переменное прямоугольное напряжение с частотой 2f0 (рис.9). При точном равенстве сдвига фаз 90о это напряжение будет иметь форму меандра, и поэтому выходное напряжение интегратора будет равно нулю.
 |
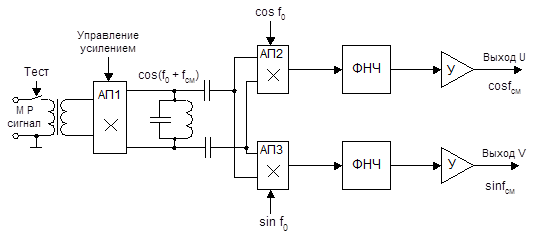 |
Рисунок 10. Синхронный детектор МР сигнала.
Первая гармоника сигнала cos(f0+fсм) выделяется на колебательном контуре и детектируется синхронным детектором, который выполнен также на аналоговых перемножителях. На их сигнальные входы подается один и тот же сигнал cos(f0+fсм), а на опорные входы – квадратурные опорные сигналы cosf0 и sinf0. Спектры выходных сигналов АП2 и АП3 описываются выражениями (2.13) и представляют собой биения колебаний. Фильтры нижних частот выделяют из этих биений низкочастотные составляющие cosfсм и sinfсм, которые несут информацию о параметрах, характеризующих локальные свойства тканей. Эти сигналы усиливаются и поступают в каналы U и V аналого-цифровых преобразователей.
Ранее отмечалась высокая помехоустойчивость синхронных детекторов. Действительно, если в принимаемом сообщении кроме полезной составляющей с частотой f0+ fсм имеется также помеха с частотой fп, близкой к f0, то, например, первое равенство системы (2.13) будет иметь вид
cos(fп+fсм) ´ сosf0 =![]() [cos(f0+fп+fсм) + cos(fп-f0+ fсм)].
[cos(f0+fп+fсм) + cos(fп-f0+ fсм)].
Если fп>f0 , то fп-f0+ fсм > fсм , и помеха оказывается за пределами полосы пропускания фильтра.
В режиме тестирования томогорафа, когда МР сигналы не принимаются, вход усилителя размыкается контактами реле, которое управляется специальным сигналом «Тест».
Конечным пунктом назначения МР сигнала в усилительном тракте являются АЦП каналов U и V. Перед каждым АЦП устанавливают фильтр НЧ с управляемой полосой пропускания, которая задается в соответствии с частотой смещения. В отличие от УЗ сканеров или цифровых РТС для цифрового преобразования МР сигнала, в принципе, не требуется сверхскоростной АЦП. Действительно, МР сигнал (тот, который считывается) длится около 8 мс. За это время требуется обычно сделать 256 отсчетов. Следовательно, время одного отсчета составляет примерно 30 мкс. Это время преобразования АЦП последовательного приближения типа К1113ПВ1, который представляет собой стандартную микросхему, имеющую все необходимое для сопряжения с ЭВМ. К тому времени, когда началась разработка первого российского МР томографа «Образ-1», эта микросхема уже выпускалась. Тем не менее, разработчики применили АЦП со структурой К1113ПВ1, но выполненный из нескольких отдельных элементов: регистр последовательного приближения (РПП), ЦАП, компаратор. Вероятно, разработчиков не устраивала разрядность К1113ПВ1 – 10, что давало точность преобразования в 0,1%. При использовании 12-разрядного РПП типа К155ИР17 точность увеличивается в 4 раза.
Структурная схема одного канала АЦП с фильтром нижних частот показана на рис.11. Фильтр нижних частот выполнен в виде двухкаскадного активного фильтра
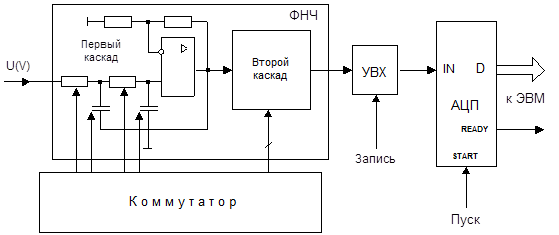 |
с характеристикой Баттерворта, обеспечивающей меньшие частотно-фазовые искажения, чем другие характеристики (например, Чебышева). Изменения полосы пропускания фильтра осуществляется коммутацией элементов R, C аналоговым коммутатором.
Передаточная характеристика одного каскада ФНЧ имеет вид
K(jw)![]() =
= ![]() ,
,
т.е. каскад является звеном второго порядка, а фильтр в целом имеет четвертый порядок. Обычно число полос пропускания фильтра выбирают так, чтобы обеспечить их взаимное перекрытие в диапазоне от –fсм.макс до +fсм.макс. Например, если частота смещения изменяется в пределах ± 8 кГц относительно f0, что соответствует максимальным расстояниям выбираемого слоя от центра магнита, то максимальная ширина полосы фильтра будет равна 16 кГц. При этом ее удобно изменять с шагом 1 кГц.
С выхода фильтра сигнал поступает на устройство выборки-хранения (УВХ), где запоминается его дискретный отсчет на время преобразования АЦП. Цифровые данные каналов U и V через мультиплексор контроллера крейта передаются в ЭВМ. Над этими данными выполняются преобразования Фурье и определяются амплитуды и фазы отдельных гармоник:
![]() и
и ![]() .
.
Современные средства электроники позволяют уменьшить размеры этого блока и одновременно улучшить его характеристики. Можно, например, использовать 12 – 16-разрядные быстродействующие АЦП зарубежных фирм, а вместо аналоговых фильтров, дискретность и избирательность которых не всегда удовлетворяют разработчиков, - специальные сигнальные процессоры. Например, на базе микросхемы MCS 296 можно построить цифровой фильтр практически с любой характеристикой.
Блоки выбора слоя и программатора уровней находятся в стадии непрерывного развития и совершенствования. При их разработке возможно много альтернативных решений, и главной задачей является выбор оптимальной конфигурации. Для выбора слоя необходима достаточная точность формирования квадратурных сигналов смещения частоты f0 и огибающей РЧ импульса и в то же время возможность их плавного регулирования. Поэтому обычно применяют смешанные аналого-цифровые способы формирования этих сигналов, например, функции квадратурных сигналов (синус и косинус) и огибающих хранят в ПЗУ, а управление их частотой и амплитудой осуществляют с помощью аналоговых сигналов – уровней.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Анализ погрешностей спутниковой радионавигационной системы, работающей в дифференциальном режиме
- Система государственной и ведомственной поверки средств измерений
- Вопросы устойчивости и общие сведения об автогенераторах
- Исследование системы управления подводного аппарата по вертикальной координате
- Структурированная кабельная система на 292 порта зданий гимназии
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем