Исследование системы управления подводного аппарата по вертикальной координате
1. Управление П.А. по разомкнутому контуру
Динамика П.А., как объекта управления по высоте над дном (глубине) может быть приближённо описана следующим дифференциальным уравнением:
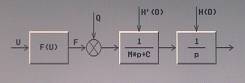
M*H’’+C*H’=F+Q
Численные значения коэффициентов: M=3000кг, C=1500кг/с, Q=1000H, Fmax=2000H, K1=400H/В, H(0)=4м, H’(0)=0м/с.
Статическая характеристика двигателя
idth=268 height=151 src="images/referats/6954/image001.jpg">
Структурная схема объекта управления в соответствии с приведённой моделью динамики.
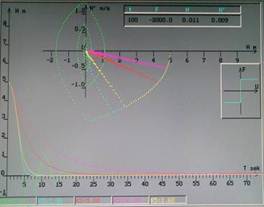
Исследуем поведение П.А. при управлении им по разомкнутому контуру, задавая последовательно U=1, -2, -2.5, -5, -100B.
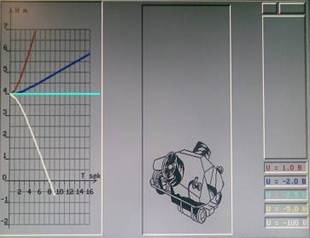
При U=1В подводный аппарат всплывает, т.к. при этом тяга движителя F=K1*U=400H и направлена вверх. Кроме того вверх направлена сила положительной плавучести Q=1000H.
При U=-2В подводный аппарат всплывает, т.к. F+Q=200H.
При U=-2,5B подводный аппарат зависает на начальной высоте из-за уравновешивания упором движителя архимедовой силы (плавучести).
При U=-5B подводный аппарат погружается.
Из-за ограничения в статической характеристике при U=-100B поведение аппарата не отличается от его поведения при U=-5B.
Выводы: управление подводным аппаратом по разомкнутому контуру, путём подачи на двигатель постоянного напряжения позволяет лишь разогнать аппарат до определённой скорости погружения или всплытия. Увеличение скорости движения П.А. при увеличении управляющего напряжения возможно лишь в пределах линейной зоны статической характеристики движителя. Автоматическое выведение подводного аппарата над дном невозможно, т.к. в момент встречи аппарата с дном его вертикальная скорость не равна нулю.
2. Построение регулятора высоты П.А.
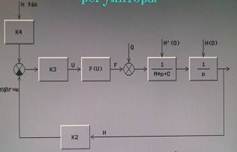
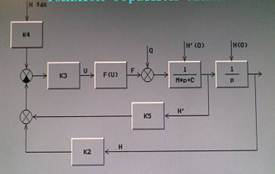
Для построения системы автоматического выведения подводного аппарата на заданную высоту (глубину) необходимо ввести обратную отрицательную связь по высоте П.А. над дном. Закон управления движителем при этом принимает вид: U=K3*(K4*H3 – K2*H)=-K3*K2*H, при H3=0.
Структурная схема регулятора:
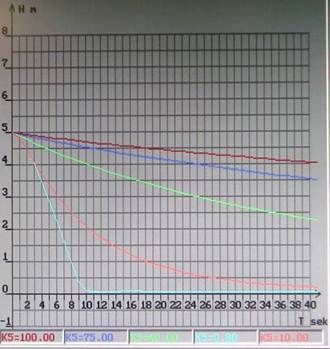
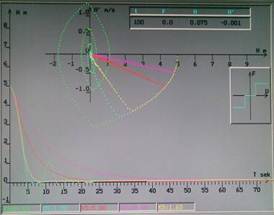
Величина коэффициента усиления регулятора К3 влияет на статическую точность и характер переходного процесса. С увеличением К3 регулятора статическая точность регулирования подводного аппарата над дном увеличивается.
При H=0.1м, К1=400Н/В, К2=1м./В и Q=1000H: К3min=25
При увеличении К3 переходный процесс протекает быстрее, но увеличивается его колебательность и перерегулирование. При уменьшении К3 время переходного процесса увеличивается, и процесс приближается к апериодическому.
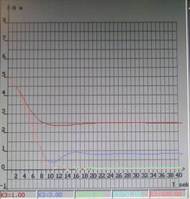
Выводы: При значениях коэффициента усиления регулятора К3>=К3min можно достичь необходимой статической точности стабилизации высоты П.А. над дном. Однако, качество переходного процесса при этом неудовлетворительно. Колебания и перерегулирования в переходном процессе приводят к ударам подводного аппарата о дно. Уменьшение коэффициента регулирования К3<К3min может привести к уменьшению колебательности в переходном процессе, что позволяет избежать ударов П.А. о дно, однако при этом ухудшается статическая точность стабилизации, а время переходного процесса обычно затягивается.
3. Коррекция качества переходного процесса
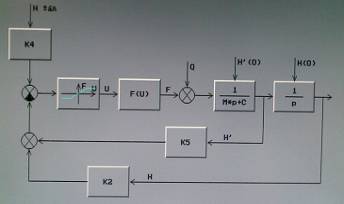
Улучшить качество переходного процесса и быстродействие в системе управления при сохранении заданной статической точности стабилизации высоты П.А. над дном можно, благодаря введению отрицательной обратной связи по скорости. Закон управления движителем при этом принимает вид:
U=K3*(K4*H3 – K2*H – К5*Н’)=K3*(-K2*H – K5*H’), при H3=0.
K2 – коэф. передачи датчика высоты П.А.
К3 – коэф. усиления регулятора.
К4 – коэф. передачи задатчика высоты П.А.
К5 – коэф. скоростной обратной связи.
Схема с введением скоростной обратной связи
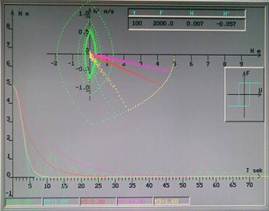
Увеличение К5 не влияет на статическую точность системы, а переходный процесс приближается к апериодическому. При уменьшении К5 переходный процесс становится более колебательным.
При H=0.1м, К1=400Н/В, К2=1м./В и Q=1000H, К3=25: оптимальное значение коэффициента скоростной обратной связи К5opt=0.8;
Для статической ошибки Нст.=0,5м значение коэффициента К3=Q/K1*K2*Нст.=5;
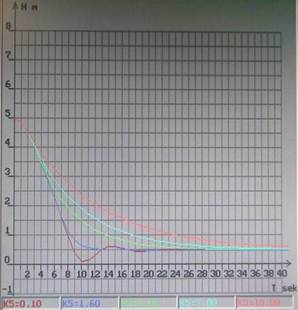
И оптимальное значение К5=1.6;
Выводы: Итак, варьируя значением коэффициента демпфирования К5 можно найти его оптимальное значение, при котором время переходного процесса минимально, а перерегулирование не превышает допустимой величины и не приводит к ударам П.А. о дно. Увеличение К5 по сравнению с его оптимальным значением, затягивает переходный процесс, увеличивая время перехода подводного аппарата на заданную глубину. Уменьшение К5 увеличивает колебательность переходного процесса, перерегулирования при этом могут превысить допустимые пределы и привести к удару аппарата о дно. Изменение К5 не влияет на статическую точность стабилизации высоты подводного аппарата.
4. Изучение релейной схемы управления П.А.
Цель: исследование релейной следящей системы управления П.А. над дном. Для построения такой системы необходимо ввести в состав автоматического регулятора высоты звено с релейной характеристикой. Мы получим нелинейную систему.
Её схема:
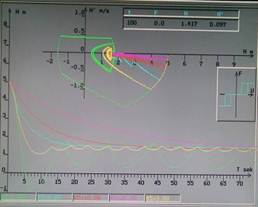
Для исследования используем метод фазовой плоскости, который заключается в построении зависимости скорости движения от его высоты.
Идеальная релейная характеристика
Трёхпозиционное реле
Реле с прямым гистерезисом
Трёхпозиционное реле с гистерезисом
Линейная характеристика с ограничением
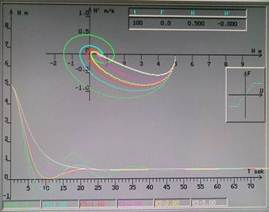
Выводы: Итак, в случае использования реле с идеальной характеристикой, линией переключения является ось ОУ. Система совершает затухающие колебания, асимптотически приближаясь к началу координат – точке устойчивого равновесия.
Для двухпозиционного реле с гистерезисом переключение происходит, когда Н=1 при Н’>0 и H=-1 при H’<0, т.е. линиями переключения являются прямые параллельные оси ОУ и проходящие через точки (-1;0) и (0;1). Фазовые траектории в этом случае не стремятся к началу координат, а сходятся к некоторому предельному циклу, т.е. в системе устанавливаются автоколебания.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем