Индивидуальный прием программ спутникового вещания
В корректоре ошибок, кроме декодера Витерби, используется деперемежитель для борьбы с пакетными ошибками, а также декодер Рида-Соломона и дескремблер. Благодаря деперемежению пакетные ошибки переходят в разряд одиночных и распределяются во времени достаточно равномерно. Это обстоятельство повышает исправляющую способность декодера РС. Наличие в системе перемежителя и деперемежителя приводит к в
ременной задержке сигнала на 187 байт.
Блочный декодер Рида-Соломона (204, 188, t = 8) является второй ступенью прямого исправления ошибок. Он обеспечивает исправление как независимых, так и пакетированных ошибок, и работает в облегченном по уровню ошибок режиме. Декодер исправляет 8 ошибочных байт в пакете из 204 байт.
Дескремблер исключает псевдослучайность, внесенную в цифровой поток на стороне передачи. Механизм дескремблирования основывается на повторном скремблировании цифрового потока при использовании идентичного генератора ПСП и сигналов инициализации скремблера. На выходе дескремблера действует транспортный поток со скоростью данных
![]() , бит/с. (3.6)
, бит/с. (3.6)
Транспортный поток из пакетов по 188 байт поступает на демультиплексор (DEMUX), который идентифицирует пакеты, относящиеся к выбранной пользователем программе. Вследствие сортировки пакетов формируются элементарные потоки видео, звука и данных.
Правильное демультиплексирование цифрового потока осуществляется благодаря прочтению сервисной информации SI, содержащейся в потоке. Алгоритм прочтения SI приведен на рисунке 3.9.
Процесс прочтения начинается с идентификатора PID = 0, по которому определяются транспортные пакеты длиной 188 байт, содержащие таблицу объединения программ PAT. В таблице указаны все номера программ, входящих в цифровой спутниковый пакет, и их идентификаторы. Для настройки приемника производится обращение к PID = 16, с которым связана таблица сетевой информации NIT. Эта таблица содержит зарегистрированный в ETSI номер сети (Network_id) и сведения, по которым приемник может автоматически настроиться на прием (позиция ИСЗ, поляризация, метод модуляции, частота, символьная скорость, относительная скорость кодирования). Далее осуществляется обращение к PID = 1 для анализа содержания таблицы CAT, в которой прописаны идентификаторы транспортных пакетов с данными разрешения на доступ.
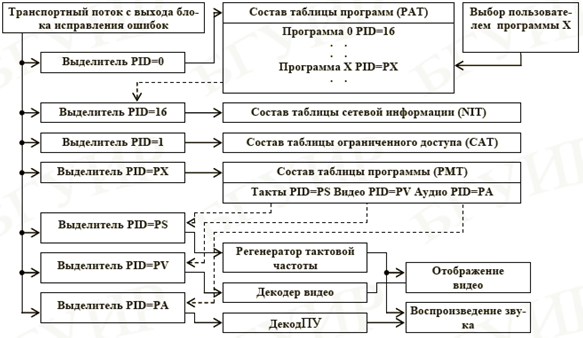
Рисунок 3.9 − Схема демультиплексирования цифрового потока
По указанной пользователем программе Х из потока выделяются пакеты с PID = PX и анализируется состав прогаммы в таблице PMT. В ней указан номер программы, ее компоненты (видео, звук, данные), их идентификаторы, тип элементарного потока и его PID, а также PID пакетов, содержащих эталонные метки времени (PCR) программы. На основании полученных PID из потока извлекаются требуемые пакеты компонент программы, которые поступают на видеодекодер MPEG-2, аудиодекодер Musicam и интерфейс RS-232. Одновременно извлекаются данные для восстановления тактовой частоты.
Декодирование закрытых программ и данных, рассылаемых по подписке, осуществляется в демультиплексоре благодаря наличию в нем дескремблера, блока условного доступа (БУД) и абонентской карточки, находящейся в слоте БУД. Порядок декодирования закрытых программ следующий. По значениям PID, взятым из таблиц CAT и PMT, выделяются пакеты сообщений управления и разрешения на доступ. Эти сообщения поступают на абонентскую карточку, в памяти которой хранятся секретный алгоритм дешифрации ключей, ограничение на доступ и сеансовые ключи, обновляемые по эфиру вещателем. Если в процессе сравнения отсутствуют расхождения на запрашиваемую информацию, то МП дает команду дешифровать кодовое слово, выделенное из транспортных пакетов СУД, и подать его на дескремблер демультиплексора для восстановления исходной информации. Если при сравнении обнаружены расхождения (срок подписки истек, запрашиваемая программа не оплачена и др.), то МП не дает разрешения на доступ кодового слова к дескремблеру, и обработка сигнала прекращается.
DEMUX программируется и управляется с МП (по 8-битной шине данных и 13-битной шине адреса) при использовании различных управляющих сигналов: чтение/запись, подтверждение данных и др.
Видеодекодер MPEG-2 восстанавливает исходное изображение, реконструируя его из кадров I-, P- и В-типа. В процессе восстановления используется деквантование, обратное дискретное косинусное преобразование, декодирование кода Хаффмана, восстановление составляющих яркости и цветности каждого кадра и др. То есть используется набор процедур, обратных принятым при компрессировании. Поскольку для восстановления изображения необходимо удержание нескольких кадров, то емкость памяти ОЗУ MPEG-2 должна быть большой. Восстановленный поток видеоданных поступает на электронный коммутатор, управляемый синхрогенератором. Благодаря коммутатору во время кадрового гасящего импульса в видеосигнал вводится информация о цветовой синхронизации SECAM, телетекст и др.
С помощью необходимых установок со стороны пользователя или в соответствии с алгоритмом реализации вспомогательных функций в приемнике на полученное изображение могут накладываться графические данные: экранное меню, параметры настройки, титры, текущее время и др.
Восстановленный поток видеоданных поступает на ЦАП для получения компонентных сигналов яркости (Y) и цветности (CR, CB). Из этих сигналов в кодере PAL (SECAM) формируются сигналы R, G, B и полный аналоговый видеосигнал (CVBS) требуемого стандарта. Для правильной работы кодера используются опорные сигналы с частотой 25 и 13,5 МГц.
Аудиоданные с выхода демультиплексора поступают на декодер звука «Musicam» для декомпрессии сигнала в соответствии с алгоритмом, находящимся в ОЗУ. Звуковые данные задерживаются на время до 1 с для синхронизации звука и изображения. Эта задержка необходима, поскольку обработка видеосигналов длится дольше, чем обработка звуковых пакетов.
Во всех бытовых моделях ЦПСВ видео- и аудиосигналы преобразуются в радиомодуляторе в радиосигнал одного из каналов ДМВ-диапазона. Посредством согласующего устройства (СУ) (см. рисунок 7.6) к радиосигналу могут быть добавлены сигналы местного телевидения и совместно поданы на антенный вход телевизора.
Управление устройствами ЦПСВ осуществляет микропроцессор (МП) и микроконтроллер (МК). МП организует управление работой демультиплексора, блока условного доступа, видео- и звукового декодеров, а также системой меню приёмника. Он имеет собственные шины данных, адреса и управления, оперативную и флэш-память, которая используется для хранения программ управления. Программы могут обновляться с компьютера или по спутниковым каналам вещательной компанией. МК осуществляет управление параметрами блока настройки, демодулятора, блока исправления ошибок и кодера PAL/SECAM. Он контролирует режим источника питания и осуществляет связь с МП. При включении ЦПСВ МП производит загрузку программного обеспечения из флэш памяти и устанавливает все узлы приемника в состояние, соответствующее параметрам последней настройки.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Разработка системы управления освещением при помощи любого пульта дистанционного управления от бытовой аппаратуры
- Схемотехника основных блоков радиопередающего устройства
- Аналого-цифровые преобразователи
- Порядок установки и корректировки МПИ эталонов. Поверка электронных аналоговых и цифровых вольтметров и амперметров
- Устройство контроля за уровнем аналоговых сигналов
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем