Автоматические швартовные лебедки
2.4.1 Законы частотного управления
Под законом частотного управления понимается соотношение между частотой и напряжением, подаваемыми на статор АД и обеспечивающими соответствие характеристик двигателя и статической нагрузки. В общем случае закон частотного управления определяется зависимостью: ![]()
Следует отметить, ч
то только при непрерывном управлении напряжением в функции всех трех указанных параметров может быть обеспечено оптимальное по определенному закону (критерию) управление частотно – регулируемым электродвигателем. Однако, реализация такого управления является сложной технической задачей. Поэтому на практике управление осуществляется по более простым законам. Закон частотного регулирования, с одной стороны определяет характеристики электропривода, а с другой – структуру построения преобразователя и системы привода. Выбор закона регулирования должен определяться конкретными условиями электропривода.
2.4.2 Основные соотношения при частотном управлении
Частотное регулирование по сравнению с другими способами имеет ряд важных преимуществ: регулирование происходит без потерь скольжения, возможно плавное изменение скорости и формирование необходимых механических характеристик и, что особенно существенно, обеспечивается возможность использования в регулируемых ЭП короткозамкнутых машин. При анализе свойств АД в системе частотного управления применяют Т – образную схему замещения, приведенную на Рис.2.10. При этом:
параметр частоты
![]()
параметр абсолютного скольжения:
![]()
параметр напряжения:

здесь:
f1, f2, f3 – частоты соответственно питающего напряжения, номинального и тока статора;
![]() - отношение абсолютного скольжения к синхронной скорости при частоте f1н, Uф, Uфн – действующие фазные значения напряжения питания текущее и номинальное.
- отношение абсолютного скольжения к синхронной скорости при частоте f1н, Uф, Uфн – действующие фазные значения напряжения питания текущее и номинальное.
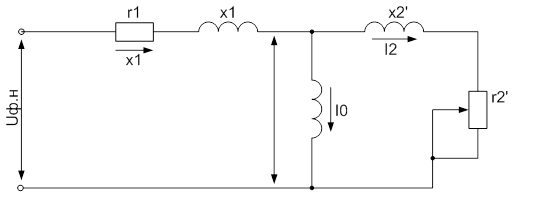
Рис.2.10. Т – образная схема замещения
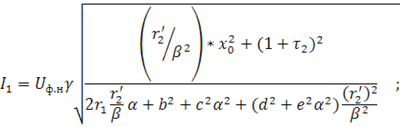
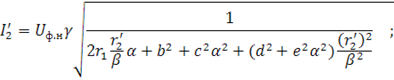
Основные зависимости, характеризующие работу двигателя, определяются из схемы замещения и имеют следующий вид:

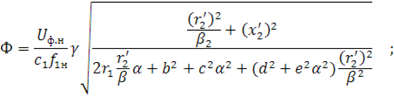
Выражение момента через поток:
В приведенных выражениях
![]()

Частота вращения
![]()
Таким образом, момент двигателя является функцией трех параметров ![]() . В общем случае напряжение регулируется в функции частоты и нагрузки, т.е
. В общем случае напряжение регулируется в функции частоты и нагрузки, т.е ![]() .
.
2.4.3 Классификация законов частотного управления
Законы частотного управления можно разделить на три основные группы: 1) управление напряжением только в функции частоты по заданной зависимости ![]() 2) непрерывное управление напряжением в функции частоты и параметра скольжения
2) непрерывное управление напряжением в функции частоты и параметра скольжения ![]() , обеспечивающее компенсацию падения напряжения в сопротивлениях статора. Частным случаем такого управления является поддержание постоянного потока; 3) оптимальное управление по минимуму потерь тока или других параметров АД. Поэтому обычно регулирование осуществляется по законам первой и второй групп с дополнительным регулированием напряжения в функции нагрузки пропорционально
, обеспечивающее компенсацию падения напряжения в сопротивлениях статора. Частным случаем такого управления является поддержание постоянного потока; 3) оптимальное управление по минимуму потерь тока или других параметров АД. Поэтому обычно регулирование осуществляется по законам первой и второй групп с дополнительным регулированием напряжения в функции нагрузки пропорционально ![]() Основная цель введения коэффициента
Основная цель введения коэффициента ![]() – устранить насыщение двигателя при уменьшении нагрузки и тем самым улучшить энергетические показатели машины. К первой группе законов управления относится закон
– устранить насыщение двигателя при уменьшении нагрузки и тем самым улучшить энергетические показатели машины. К первой группе законов управления относится закон  , который получил название основного закона частотного управления и был впервые установлен академиком М.П. Костенко для идеализированного двигателя. Управление по законам
, который получил название основного закона частотного управления и был впервые установлен академиком М.П. Костенко для идеализированного двигателя. Управление по законам ![]() обеспечивает постоянство параметра скольжения
обеспечивает постоянство параметра скольжения ![]() при заданной частоте.
при заданной частоте.
Управление по законам ![]() обеспечивает постоянство частоты тока ротора во всем диапазоне регулирования.
обеспечивает постоянство частоты тока ротора во всем диапазоне регулирования.
2.4.4 Рекомендации по выбору законов частотного управления
1. Законы регулирования ![]() не обеспечивают корректировку напряжения в функции нагрузки, что приводит к снижению перегрузочной способности с уменьшением частоты.
не обеспечивают корректировку напряжения в функции нагрузки, что приводит к снижению перегрузочной способности с уменьшением частоты.
2. Частотное управление с компенсацией падения напряжения на сопротивлениях статора по закону ![]() обеспечивает постоянство перегрузочной способности на всех частотах и может применяться при любых характеристиках нагрузки.
обеспечивает постоянство перегрузочной способности на всех частотах и может применяться при любых характеристиках нагрузки.
3. Законы частотного управления ![]() и
и ![]() с корректировкой напряжения по моменту нагрузки
с корректировкой напряжения по моменту нагрузки ![]() обеспечивают работу двигателя с постоянной частотой ротора, причем в первом случае частота ротора f2 = const при f1 = const, а во втором f2 = const при произвольном изменении частоты статора. Эти законы применимы для тех механизмов, что и основные законы (без корректировки по моменту), однако обеспечивают более высокие экономические показатели.
обеспечивают работу двигателя с постоянной частотой ротора, причем в первом случае частота ротора f2 = const при f1 = const, а во втором f2 = const при произвольном изменении частоты статора. Эти законы применимы для тех механизмов, что и основные законы (без корректировки по моменту), однако обеспечивают более высокие экономические показатели.
4. Законы регулирования по минимуму потерь или тока двигателя целесообразны для механизмов, габариты исполнительных двигателей которые определяются потерями, а не максимальным моментом. Однако реализация управления по оптимальным законам является весьма сложной. Для упрощения реализации системы рекомендуется применять управление по минимуму потерь в наиболее характерных режимах.
2.5 Система управления преобразователем частоты
2.5.1 Принцип действия системы управления преобразователем частоты
Упрощенная блок – схема системы управления преобразователем частоты приведена на Рис. 2.11. Как видно из рисунка она включает следующие основные звенья:
1. Входное устройство ВУ, осуществляющее преобразование управляющего сигнала в напряжение:
Другие рефераты на тему «Транспорт»:
- Анализ технико-эксплуатационных показателей работы транспорта и перевозочного процесса
- Расчет эксплуатационных свойств автомобилей УАЗ 3741 и Volkswagen Transporter T4
- Проектирование агрегатов самолёта
- Регулятор напряжения автомобильного синхронного генератора с когтеобразным ротором
- Разработка технологического процесса текущего ремонта карданной передачи ВАЗ 21053
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск