Автоматические швартовные лебедки
Введение
Низкие энергопоказатели традиционных систем управления ЭП и недостаточная надежность релейно – контакторной аппаратуры приводит к тому, что последние не соответствуют требованиям повышения технического уровня целого ряда механизмов. Поэтому внедрение тиристорных электроприводов на судах морского и речного флота необходимо с целью решения таких основных задач, как: повышени
е эффективности использования электромеханизмов на основе улучшения регулировочных, энергетических и динамических свойств электроприводов, а также повышения надежности их работы и снижения затрат на эксплуатацию судовых механизмов при переходе с релейно – контакторных на бесконтактные полупроводниковые системы управления.
При постоянно возрастающей тенденции развития электроприводов механизмов внедрение ЭП с тиристорными преобразователями переменного и постоянного тока является определяющим направлением в современном морском и речном флоте. Но это не значит, что для всех без исключения ЭП необходима сложная тиристорная система регулирования. Для тех механизмов, у которых производительность находится на высшем уровне и удовлетворяет современным требованиям и в дальнейшем, целесообразно использование простых систем, которые позволяют обеспечить требуемые высокие эксплуатационные показатели.
Наиболее высокими техническими показателями обладают частотно – регулируемые электроприводы и инверторными преобразователями частоты и односкоростными асинхронными электродвигателями с короткозамкнутым ротором.
Обладая высокими регулировочными и энергетическими показателями эти электроприводы позволяют получить предельные показатели по уровню производительности, диапазону регулирования, скорости, удельным параметрам и надежности исполнительного двигателя.
Это особенно необходимые качества для механизмов, работающих в повторно – кратковременных режимах, у которых при определении технических показателей механизма играют потери в переходных режимах. Для таких систем применение электропривода с частотным регулированием является наиболее эффективным и единственным возможным, когда речь идет об определенных условиях эксплуатации.
Для того, чтобы рассмотреть сферу применения регулируемых электроприводов с короткозамкнутым ротором в настоящее время разрабатываются новые системы с преобразователями непосредственного типа (непосредственные преобразователи частоты). Они обеспечивают частотное регулирование в ограниченной зоне, примерно до 40% номинальной частоты вращения электропривода
Электроприводы на основе таких НПЧ по уровню предельной мощности и производительности использования электродвигателя очень заметно уступают таким же системам, но с инверторным преобразователем частоты.
Электроприводы с ПЧИ и тиристорные электроприводы постоянного тока обеспечивают наиболее оптимальные регулировочные характеристики и имеют относительно лучшие показатели по условиям работы и их стоимости.
Сравнительно ограниченное применение таких систем связано с тем, что в них используются коллекторные машины постоянного тока с относительно низким уровнем надежности при использовании их на судах.
Первоначальное значение в повышении эффективности имеют высокие энергетические свойства тиристорных электроприводов и их регулировочные характеристики. Такое повышение эффективности достигается оптимизацией работы двигателя в установившемся и переходных режимах и благодаря регулированию выходных параметров преобразователя.
Глава 1. Анализ существующих и перспективных систем управления автоматическими швартовными лебедками
1.1 Назначение, классификация и принцип действия автоматических швартовных лебедок
1.1.1 Назначение и классификация АШЛ
Автоматические швартовные лебедки необходимы для поддержания заданного уровня швартовного режима судна при необходимой безопасности стоянки и сохранности швартовных концов. Заметное изменение координат клюзов под действием внешних сил действует на изменение угла заводки швартовных канатов, следовательно АШЛ переходит в новый режим работы.
В настоящее время не существует единого подхода к установлению оптимального режима или программы для АШЛ, т.к. условия работы АШЛ в каждом конкретном случае индивидуальны.
Поэтому общепринятым понятием для автоматизации автоматических швартовных лебедок является стабилизация натяжения швартовных концов на необходимом заданном уровне. АШЛ автоматически при увеличении натяжения на канате стравливает его или подбирает слабину при изменении натяжения.
Особенностью механизма лебедки как системы авторегулирования заключается в натяжении (ослаблении) швартовного каната, это является возмущающим фактором и регулируемым параметром АШЛ.
По отношению к другим обобщенным координатам судна система остается разомкнутой, это является ее существенным недостатком.
Не только ветер, течение или волновые воздействия влияют на изменение угла заводки швартовных канатов. Возмущающим фактором для этого могут служить и погрузочно – разгрузочные работы, при проведении которых могут заметно меняться координаты клюзов, а также шлюзование или стоянка судна в условиях приливов и отливов, которые могут достигать широких пределов. Например при погрузочно – разгрузочных работах танкере вертикальное перемещение клюза может изменяться в пределах от 0,7 до 1 м/мин, а при шлюзование 0,5 – 1 м/мин. В этих условиях АШЛ играют важную роль, т.к. автоматизация процесса швартовки дает возможность высвободить большую часть палубной команды, избавить людей от тяжелого и опасного труда: постоянных перетяжек и нахождения непосредственно у канатов.
Использование АШЛ дает возможность применения стальных тросов, которые более долговечны и надежны в работе, чем синтетические и растительные.
Достаточное количество АШЛ на судне, их постоянная готовность к работе в достаточной мере дает возможность существенно сократить общий объем швартовных операций, уменьшить опасность труда обслуживающего персонала.
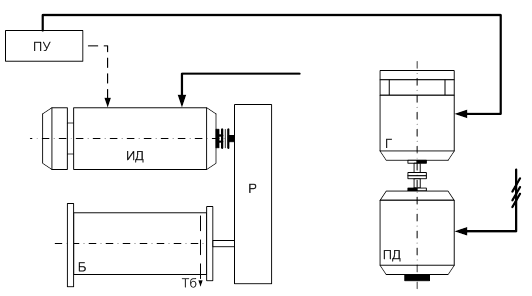
Рис.1.1. Структурная схема.
Например, фирма АСЕА комплектует некоторые системы с двухцепными эсператорами, это предусматривает обслуживание приводов сразу двух лебедок.
Эти системы имеют достаточно высокие технико – экономические показатели по сравнению с другими.
При швартовных операциях ручное управление производится с ПУ (командоаппарата). Сигнал с ПУ поступает на возбуждение генератора (Г) и двигателя (ИД), создает тяговые характеристики лебедки, необходимые для работы. При переходе в автоматический режим, рукоятка ПУ ставится в одно из начальных положений, в зависимости от необходимого натяжения. Состояние равновесия достигается самостоятельно, т.е. если усилие небольшое, то двигатель работает в двигательном режиме, выбирая слабину. Если натяжение увеличилось, то частота вращения ИД (согласно характеристике) падает до полной остановки и стоянки од током. Если начальное натяжение велико, то происходит стравливание каната до выравнивания противодействующих моментов, а ИД работает в режиме противовключения. Для этой группы АШЛ характерно, что частота двигателя является переменной и определяется приведенным моментом на двигателе.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск