Разработка информационного канала управления автоматизированным электроприводом
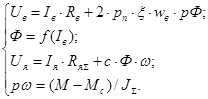
Объект управления описывается следующими уравнениями [3, стр.38-39]:
Выберем двухконтурную систему управления скорости с внутренним контуром потока (рис. 1).
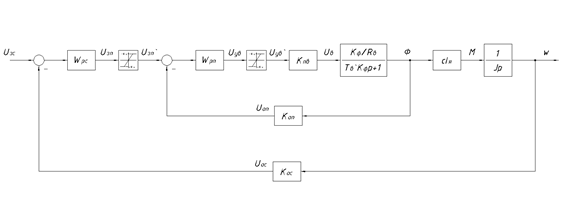
Рис. 1. Двухконтурная система регулирования скорости.
Внутренний контур потока> представлен на рис. 2.
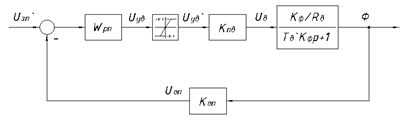
Рис. 2. Контур регулирования потока.
Универсальная кривая намагничивания представлена на рис. 3.
Так как регулирование происходит изменением потока, минимальный поток будет при максимальной скорости:
![]()
Минимальный ток возбуждения (по рис. 3):
![]()
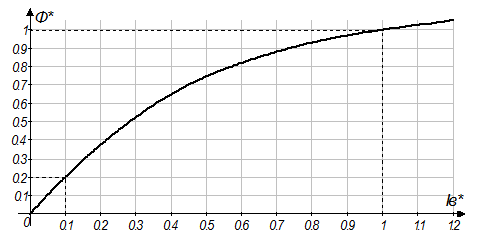
Рис. 3. Универсальная кривая намагничивания.
При этом коэффициент линеаризации кривой намагничивания лежит в диапазоне:
![]()
![]()
Максимальная постоянная времени потока:
![]()
Коэффициент форсирования тока возбуждения [4, стр. 559]:
![]()
Малая постоянная времени:
![]()
Желаемая передаточная функция замкнутого контура потока:
![]()
Желаемая передаточная функция разомкнутого контура потока:
![]()
Передаточная функция разомкнутого контура потока:
![]()
Коэффициент обратной связи по потоку:
![]()
Передаточная функция регулятора потока:
![]()
![]()
![]()
Коэффициент ![]() подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
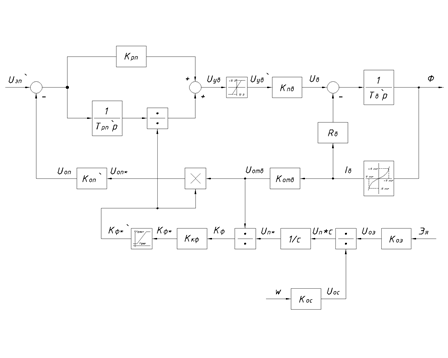
Рис. 4. Модифицированный контур регулирования потока.
Коэффициент обратной связи по скорости:
![]()
Коэффициент обратной связи ЭДС:
![]()
Коэффициент обратной связи по току возбуждения:
![]()
Коэффициент нормализации ![]()
![]()
С учётом этого:
![]()
![]()
Внешний контур скорости представлен на рис. 5.
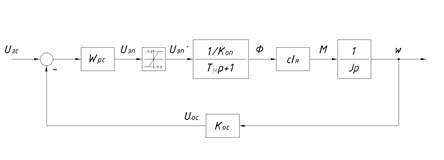
Рис. 5. Контур регулирования скорости.
Желаемая передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция регулятора скорости:
![]()
![]()
Так как нагрузка с постоянной мощностью изменяет знак ![]() и коэффициент
и коэффициент ![]() подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
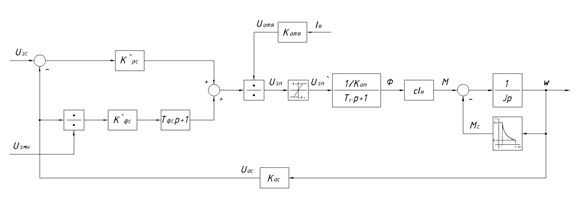
Рис. 6. Модифицированный контур регулирования скорости.
Коэффициент обратной связи по току якоря:
![]()
Отсюда следует:
![]()
Передаточная функция контура компенсирующего влияние нагрузки:
![]()
Коэффициент задания мощности нагрузки:
![]()
Откуда (с учётом принятых выше коэффициентов) имеем:
![]()
![]()
![]()
Структура системы управления стабилизатором напряжения в цепи якоря приведена на рис. 7.
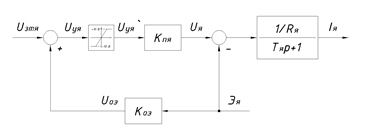
Рис. 7. Контур управления напряжением якоря.
Здесь:
![]()
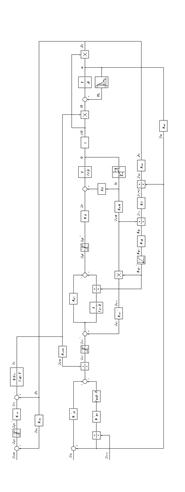
Структурная схема всей системы управления и объекта приведена на рис. 8.

3. Моделирование процессов управления, определение и оценка показателей качества
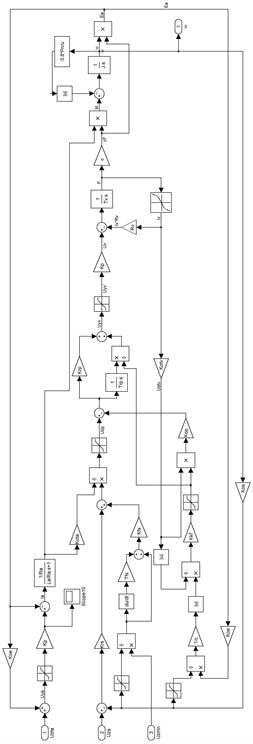
Модель объекта и системы управления в комплексе ![]() представлена на рис. 9.
представлена на рис. 9.
 | |||
 | |||
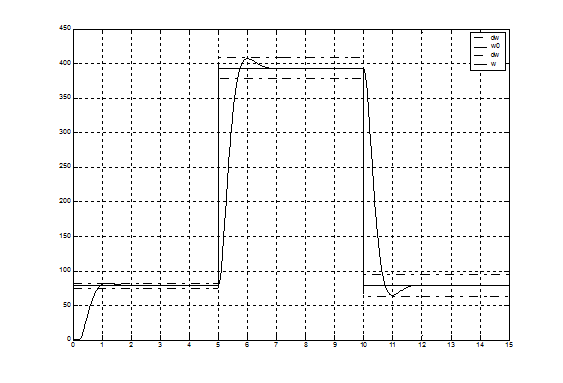
Моделирование будем проводить по нижеследующему алгоритму:
a. Пуск на номинальную скорость - ![]()
максимальный скачёк задания -![]() , (рис. 10 – рис. 14)
, (рис. 10 – рис. 14)
b. Проверка отработки задания - ![]() (рис. 15 – рис. 19)
(рис. 15 – рис. 19)
![]()
![]()
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем