Разработка информационного канала управления автоматизированным электроприводом
Рис. 10. Зависимость ![]() от времени.
от времени.
![]()
![]()
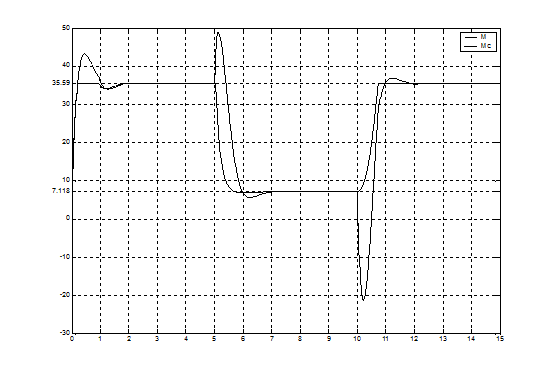
Рис. 11. Зависимость ![]() и
и width=25 height=24 src="images/referats/11136/image111.png">от времени.
![]()
![]() Рис. 12. Зависимость
Рис. 12. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
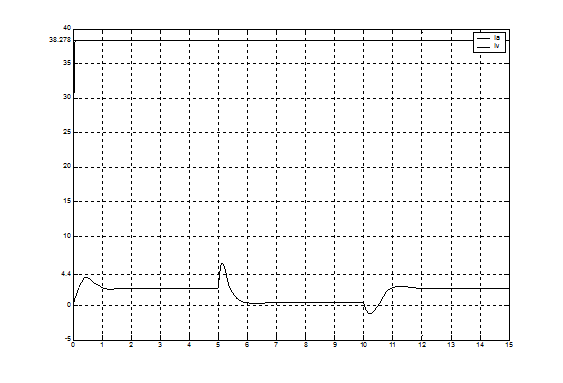
![]() Рис. 13. Зависимость
Рис. 13. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
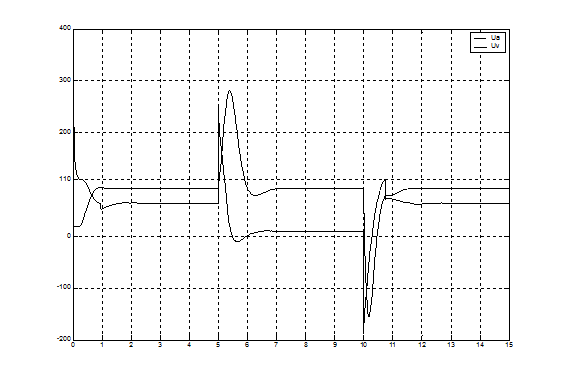
![]() Рис. 14. Зависимость
Рис. 14. Зависимость ![]() от времени.
от времени.
![]()
![]()
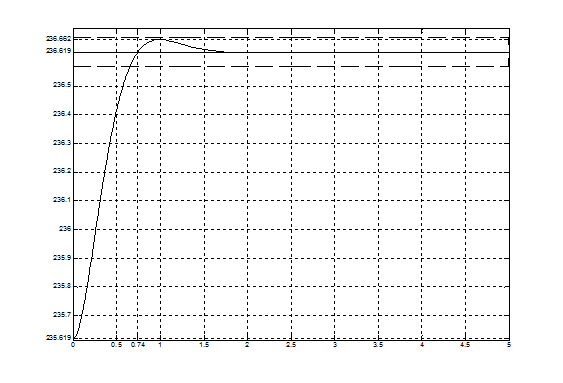
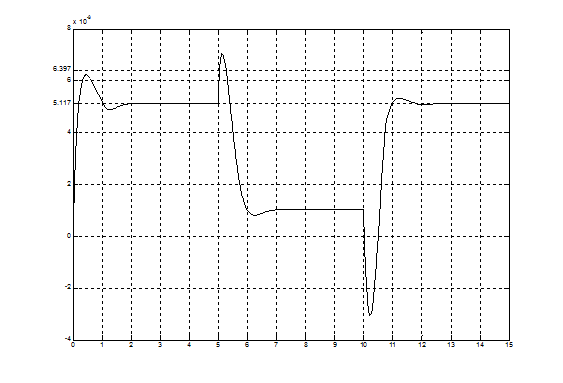
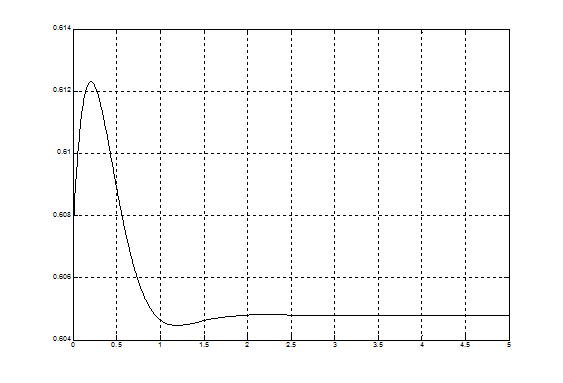
Рис. 15. Зависимость ![]() от времени.
от времени.
![]()
![]()
![]()
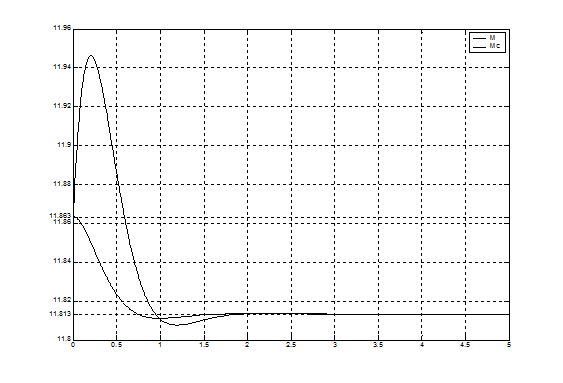
Рис. 16. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 17. Зависимость
Рис. 17. Зависимость ![]() от времени.
от времени.
![]()
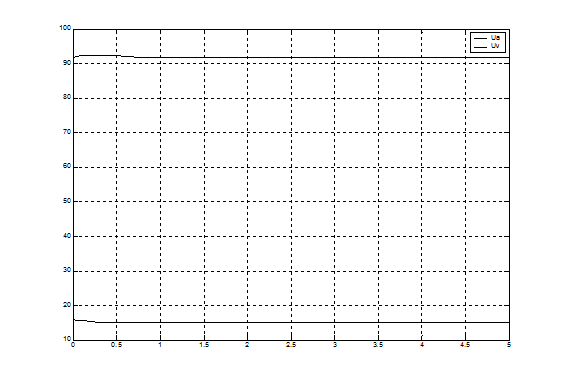
![]() Рис. 18. Зависимость
Рис. 18. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()

![]() Рис. 19. Зависимость
Рис. 19. Зависимость ![]() от времени.
от времени.
Для технического оптимума:
-перерегулирование составляет:
![]()
-время нарастания:
![]()
По результатам моделирования:
-перерегулирование составляет:
![]()
-время нарастания:
![]()
Статическая ошибка отсутствует.
Отсюда можно сделать вывод:
динамика и статика спроектированной системы полностью удовлетворяет требованиям технического задания.
4. Разработка принципиальной электрической схемы и выбор её элементов
Обратная связь по скорости.
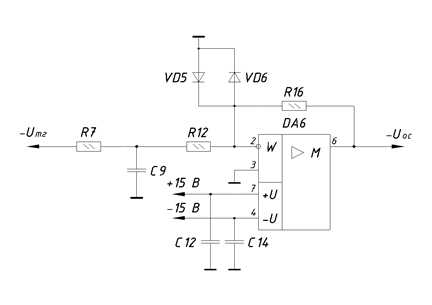
Рис. 20. Обратная связь по скорости.
Схема обратной связи по скорости представлена на рис. 20, здесь:
-фильтр коллекторных пульсаций тахогенератора с ![]() :
:
![]() -
- ![]() ,
,
![]() -
- ![]() ;
;
-цепь защиты от обрыва обратной связи:
![]() -
- ![]() с параметрами :
с параметрами :
![]() - максимальный прямой ток,
- максимальный прямой ток,
![]() - прямое напряжение,
- прямое напряжение,
![]() - максимальное обратное напряжение,
- максимальное обратное напряжение,
![]() - ёмкость диода,
- ёмкость диода,
![]() - максимальная рабочая частота;
- максимальная рабочая частота;
-тахогенератор ![]() встроенный в двигатель:
встроенный в двигатель:
![]()
-коэффициент усиления схемы:
![]()
![]()
![]() -
- ![]() ,
,
![]()
- ![]() ;
;
-усилительный элемент:
![]() -
-![]() с параметрами:
с параметрами:
![]() - напряжение питания,
- напряжение питания,
![]() - максимальное выходное напряжение,
- максимальное выходное напряжение,
![]() - входной ток,
- входной ток,
![]() - коэффициент нарастания напряжения,
- коэффициент нарастания напряжения,
![]() - коэффициент усиления по напряжению,
- коэффициент усиления по напряжению,
![]() - максимальная рабочая частота;
- максимальная рабочая частота;
-фильтр пульсаций напряжения питания усилителя:
![]() -
- ![]() ,
,
Обратная связь по току якоря.
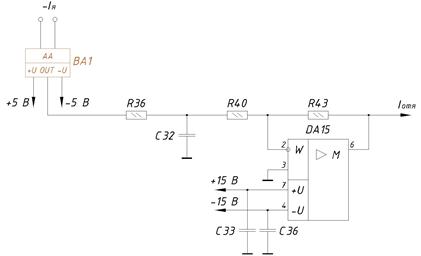
Рис. 21. Обратная связь по току якоря.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Аналого-цифровые преобразователи
- Гибкие производственные линии (ГПЛ) механообрабатывающего производства корпусных деталей
- Арифметическое кодирование. Кодирование длин повторений
- Электрические датчики в современной металлургии
- Испытания РЭСИ на механические воздействия - обнаружение резонансных частот, вибропрочность и виброустойчивость
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем