Структурный синтез устройств с мультидифференциальными операционными усилителями
где ![]() .
.
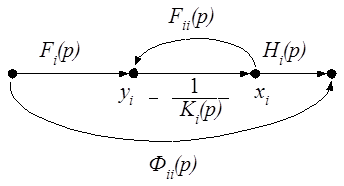
Рис. 7. Сигнальный граф электронной схемы при влиянии i-го МОУ
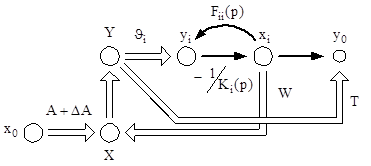
Рис. 8. Векторный сигнальный граф электронной системы
при влиянии i-го входа МОУ
Решение системы уравн
ений (57) приводит к следующему результату:
 , (58)
, (58)
![]() .
.
При обращении матрицы ![]() воспользуемся методом пополнения:
воспользуемся методом пополнения:
 . (59)
. (59)
Следовательно, передаточная функция структуры
, (60)
где ![]() ; (61)
; (61)
![]() . (62)
. (62)
Таким образом, введение вектора W обеспечивает изменение только локальных функций ![]() и
и ![]() , со-храняя при этом неизменными передаточную функцию идеализированной системы Фu(p) и передаточную функцию на выходе i-го активного элемента Fi(p). Изменение знака в (61) и (62), как это видно из (56), достигается за счет дифференциальных свойств активных элементов схемы.
, со-храняя при этом неизменными передаточную функцию идеализированной системы Фu(p) и передаточную функцию на выходе i-го активного элемента Fi(p). Изменение знака в (61) и (62), как это видно из (56), достигается за счет дифференциальных свойств активных элементов схемы.
Полученный результат имеет достаточно простую физическую трактовку. При идеальном активном элементе (![]() ) дифференциальный входной сигнал xi не зависит от частоты, а при бесконечном статическом коэффициенте усиления этот сигнал равен нулю и дополнительный контур обратной связи прекращает свое действие, что в конечном счете и сохраняет неизменным не только идеализированную передаточную функцию, но и локальную функцию Fi(p). Таким образом, получение топологических условий собственной компенсации является достаточным.
) дифференциальный входной сигнал xi не зависит от частоты, а при бесконечном статическом коэффициенте усиления этот сигнал равен нулю и дополнительный контур обратной связи прекращает свое действие, что в конечном счете и сохраняет неизменным не только идеализированную передаточную функцию, но и локальную функцию Fi(p). Таким образом, получение топологических условий собственной компенсации является достаточным.
Покажем их единственность. Из соотношений (46) и (57) следует, что для сохранения функций Фu(p) и Fi(p) необходимо сохранить не только матрицы В и DВ, но и набор векторов Т, А, D А,![]() . Единственная незафиксированная составляющая набора предложенных функций ui связывает вход i-го активного элемента источником x. Действительно,
. Единственная незафиксированная составляющая набора предложенных функций ui связывает вход i-го активного элемента источником x. Действительно,
![]() , (63)
, (63)
![]() .
.
Этот вывод подтверждается и рассмотрением векторного сигнального графа (рис. 8). Создание параллельного пути передачи от узла xi к выходу схемы возможно только его соединением с дополнительным входом схемы и, следовательно, как это видно из (21), со входами активных элементов. Таким образом, сформулированное условие является единственным.
Ответ на вопрос об уровне компенсации в общем случае остается открытым, так как зависит от структуры матрицы [В + DВ] и вектора W. Из (63) видно, что в общем случае полную компенсацию обеспечить невозможно в силу неосуществимости условия
![]() . (64)
. (64)
В этой связи применение настоящего результата при решении практических задач связано с анализом структуры поправочных полиномов электронных схем различного функционального назначения.
5. Звенья активных фильтров с мультидифференциальными ОУ
При построении активного интерфейса современных систем радиоэлектронного назначения особое место занимают активные фильтры, обеспечивающие предварительную частотную селекцию сигналов сенсорных элементов. Именно точность реализации необходимых частотных характеристик и динамический диапазон этих устройств непосредственно определяют основные качественные показатели многих микрокомпьютерных систем автоматического управления и технической диагностики. В основе построения как многопетлевых, так и каскадных фильтров лежат звенья, реализующие передаточную функцию второго порядка. Использование принципа собственной компенсации влияния площади усиления дифференциальных ОУ практически всегда связано с увеличением в схеме их числа и, следовательно, к увеличению потребляемой мощности [9]. Покажем эффективность использования в их структуре мультидифференциальных ОУ.
В общем случае звено второго порядка должно реализовать следующую передаточную функцию:
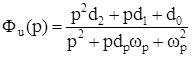 , (65)
, (65)
где ![]() и
и ![]() – соответственно частота и затухание полюса.
– соответственно частота и затухание полюса.
Влияние площади усиления ОУ приводит к приращению знаменателя этой функции на следующий полином:
![]() , (66)
, (66)
где ![]() – коэффициенты, обратно пропорциональные площади усиления ОУ.
– коэффициенты, обратно пропорциональные площади усиления ОУ.
Именно поэтому в рабочем диапазоне частот это приводит к изменению как затухания, так и частоты полюса звена:
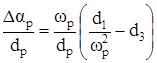 , (67)
, (67)
 . (68)
. (68)
Приведенные соотношения показывают, что относительное изменение затухания полюса пропорционально реализуемой добротности ![]() и для высокоселективных устройств может достигать больших значений, включая и потерю устойчивости. В то же время, как это хорошо известно из теории фильтров, отклонение частоты полюса от желаемого значения в
и для высокоселективных устройств может достигать больших значений, включая и потерю устойчивости. В то же время, как это хорошо известно из теории фильтров, отклонение частоты полюса от желаемого значения в ![]() раз сильнее влияет на изменение реализуемых частотных характеристик. Именно поэтому обеспечение высоких качественных показателей связано со стабилизацией как затухания, так и частоты полюса звеньев второго порядка.
раз сильнее влияет на изменение реализуемых частотных характеристик. Именно поэтому обеспечение высоких качественных показателей связано со стабилизацией как затухания, так и частоты полюса звеньев второго порядка.
Рассмотрим основные подходы к решению этой задачи. Из (47) и (62) видно, что в рамках принципа собственной компенсации относительные изменения полинома
 (69)
(69)
должны компенсироваться введением дополнительных связей, образующих следующее приращение
 . (70)
. (70)
Тогда
 , (71)
, (71)
 . (72)
. (72)
Соотношения (71) и (72) показывают, что выбором ![]() и знаков ki можно обеспечить любой уровень собственной и взаимной компенсаций влияния площади усиления активных элементов на частоту и затухание полюса. Вытекающие из этих выражений функциональные признаки приведены в табл. 1.
и знаков ki можно обеспечить любой уровень собственной и взаимной компенсаций влияния площади усиления активных элементов на частоту и затухание полюса. Вытекающие из этих выражений функциональные признаки приведены в табл. 1.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем