Проектирование системы автоматического слежения
Рисунок 3.3 – ЛАЧХ последовательного корректирующего звена(а-а-а… - ЛАЧХ заданной системы, б-б-б… - ЛАЧХ желаемой, с-с-с… - ЛАЧХ последовательного корректирующего звена)
В зависимости от вида ЛАЧХ записываем передаточную функцию корректирующего звена:
![]() (3.7)
(3.7)
4. Моделирование системы слежения с непрерывным последовательным скорректированым звеном
4.1 Моделирование переходных процессов в скорректированной САУ
Для проверки соответствия показателей качества скорректированной системы заданным показателям качества проведем моделирование переходного процесса с помощью пакета прикладных программ SIAM.
g(t) x(t) y(t)
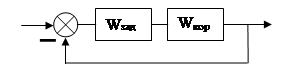
Рисунок 4.1 - Структурная схема скорректированной САУ.
Полученная переходная характеристика скорректированной системы представлена на рисунке 4.2.
По полученной переходной характеристике определим прямые показатели качества:
![]()
![]() время регулирования, время в течении которого отклонение выходной величины от установившегося значения становится меньше заданной величины ∆.
время регулирования, время в течении которого отклонение выходной величины от установившегося значения становится меньше заданной величины ∆.
∆=(0.05÷0.1)h∞=0.05∙1=0.05; (4.1)
Следовательно время регулирования равно: ![]()
σ – перерегулирование, максимальное отклонение выходной величины от установившегося значения по отношению к установившемуся значению:
![]() (4.2)
(4.2)
По полученным критериям видно, что они не превышают заданных значений, следовательно, коррекция системы выполнена правильно и показатели качества удовлетворяют заданным условиям.
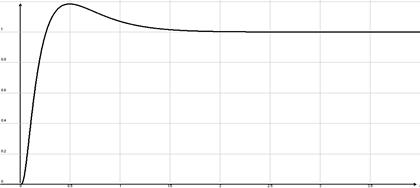
Рисунок 4.2 - Переходная характеристика скорректированной системы
Выводы
В курсовой работе была спроектирована система слежения на сельсинах. Система обеспечивает синхронное и синфазное вращение двух осей, механически не связанных между собой. Такая система широко используется для дистанционного управления разными механизмами, а также при построении автоматических систем управления в разных областях промышленности.
В работе были рассчитаны необходимые величины для выбора исполнительного двигателя и ЭМУ. Выбранный двигатель М1-32 и усилитель ЭМУ12-А3 больше других подходят по техническим характеристикам.
Также были построены ЛАЧХ и ЛФЧХ нескорректированной, желаемой и скорректированной системы. При построении желаемая ЛАЧХ не попала в запретную область, следовательно, коэффициент усиления системы обеспечивает заданную точность слежения. Скорректированная система была проверена на устойчивость. Проверка показала, что замкнутая система устойчива. Также определили запасы устойчивости по амплитуде и фазе, они достаточны для работы системы в заданном режиме.
Следящая система автоматического управления, спроектированная в данном курсовом проекте, имеет необходимый запас устойчивости по фазе и по амплитуде. Время регулирования и перерегулирование, полученные при моделировании переходного процесса скорректированной САУ, находятся в заданных пределах, что даёт возможность говорить об устойчивости полученной системы.(![]()
![]() ;
; ![]() ;
; ![]() )
)
Простота передаточной функции корректирующего звена объясняется тем, что заданная система находится на границе запрещённой области, и для её корректировки нет необходимости применять сложные звенья.
Список литературы
1. Методичні вказівки до курсового проектування з дисципліни ”Основи автоматики” для студентів спеціальностей 7.091001 “Виробництво електронних засобів”/ А.О.Андрусевіч та інщі.–Харків:ХНУРЕ.–2001.–24с.
2. Методичні вказівки до лабораторних робіт з дисципліни “Основи автоматики” для студентів спеціальностей 7.091001 “Виробництво електронних засобів”/ Упоряд.: С.В. Денисов, О.В.Нежевенко, І.О. Яшков.– Харків: ХТУРЕ.–2001.–48с.
3. Расчёт автоматических систем/ Под ред. А.В. Фатеева.- М.: Высш.шк., 1973.-336с.
4. Ерёменко И.Ф. Теория автоматического управления: Уч. пособие, часть 1.- Харьков: ХТУРЭ, 1998.-100 с.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Аналоговые перемножители и напряжения
- Организация сети передачи голоса по IP протоколу на базе распределенной локальной вычислительной сети АГУ
- Организация статистического приемочного контроля по количественному признаку
- Электронные пушки с большим пространственным зарядом
- Разработка универсального источника бесперебойного питания
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем