Проектирование системы автоматического слежения
Реферат
Объект исследования – система слежения.
Цель работы – проектирование системы слежения, которая удовлетворяет заданным техническим условиям.
Метод исследования – синтез, моделирование переходных процессов в САУ, расчет и исследование последовательного корректирующего звена.
Для расчета системы слежения необходимо: разработать функциональную систему слежения; выбр
ать элементы схемы, рассчитать передаточные функции; построить ЛФЧХ нескорректированной системы, желаемой системы и последовательного корректирующего звена; исследовать систему на устойчивость; определить показатели качества полученной системы.
СИСТЕМА СЛЕЖЕНИЯ, СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, САУ, ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, ПЕРЕРЕГУЛИРОВАНИЕ, РЕГУЛИРОВАНИЕ, ЗАПАС УСТОЙЧИВОСТИ ПО ФАЗЕ, ЗАПАС УСТОЙЧИВОСТИ ПО АМПЛИТУДЕ, ЛАЧХ, ЛФЧХ, КОРРЕКТИРУЮЩЕЕ ЗВЕНО.
Содержание
Введение
1. Порядок расчета системы слежения
1.1 Разработка функциональной схемы
1.2 Выбор исполнительного двигателя
1.3 Выбор усилителя мощности
2. Составление передаточных функций элементов системы слежения
2.1 Исполнительный двигатель
2.2 Электромашинный усилитель
2.3 Усилитель
2.4 Фазовый детектор
2.5 Измерительный прибор
2.6 Редуктор
3. Расчет последовательного непрерывного корректирующего звена методом логарифмической амплитудно-частотной характеристики
3.1 Проверка заданной системы слежения
3.2 Построение ЛАЧХ заданной (нескорректированной) системы
3.3 Построение желаемой ЛАЧХ
3.4 Построение запрещенной области
3.5 Расчет последовательного корректирующего звена
4. Моделирование системы слежения с непрерывным последовательным скорректированным звеном
4.1 Моделирование переходных процессов в скорректированной САУ
Выводы
Перечень ссылок
Введение
Цель курсового проектирования – получение навыков расчета линейных, нелинейных и импульсных систем автоматического управления (САУ), предназначенных для автоматизации производственных процессов, а также для управления механизмами общепроизводственного назначения, проектирования систем слежения для автоматического регулирования; научиться синтезировать промышленные регуляторы, моделировать переходные процессы в САУ. Задачи курсового проекта – синтезирование, моделирование переходных процессов в САУ.
Проектирование следящей системы охватывает широкий круг вопросов - от математической постановки задачи до рабочих чертежей и их окончательной отработки по результатам испытаний опытных образцов. Поэтому, естественно, в многочисленных исследованиях, связанных с проектированием систем различного назначения, рассматриваются лишь отдельные аспекты этой большой проблемы.
Система слежения такого типа широко используется для дистанционного регулирования разными механизмами, а также при построении автоматических систем регулирования в разных отраслях промышленности. Использование систем слежения для автоматического регулирования, для решения задач автоматизации производственных процессов содействует появлению технико-экономического эффекта, значение которого определяется особенностями самих объектов регулирования, которые используются при производстве электронных средств.
1. Порядок расчета системы слежения
1.1 Разработка функциональной схемы
В системе слежения, которое проектируется как исполнительное устройство, используется двигатель постоянного тока (Д) серии МИ, как усилитель мощности электромашинный усилитель с поперечным полем (ЭМУ). Для измерительного устройства (ИУ) рекомендуется использовать сельсильную пару: сельсин-первичный измерительный преобразователь и сельсин-трансформатор (приемник). Поскольку измерительное устройство работает на переменном токе, то после измерительного устройства должен использоваться фазовый детектор (ФД). Кроме указанных элементов в функциональную схему входят управляющее устройство, усилитель напряжения (У), редуктор (Р), при помощи которого исполнительный соединяется с объектом управления и ротором сельсина-трансформатора, и объект управления (ОУ).
Функциональная схема системы слежения представлена на рисунке 1.1.
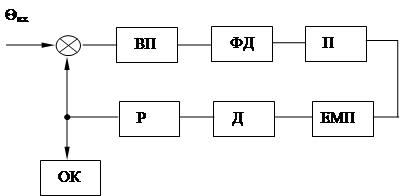
Рисунок 1.1–Функциональная схема системы слежения
(![]() -входной сигнал).
-входной сигнал).
1.2 Выбор исполнительного двигателя
Выбор двигателя начинаем с расчёта необходимой мощности, которая должна быть достаточной для обеспечения заданных скоростей и ускорений объекта управления при заданной нагрузке.
Необходимая мощность ![]() , Вт(1.1):
, Вт(1.1):
![]() ,(1.1)
,(1.1)
где ![]() – коэффициент полезного действия (КПД) редуктора
– коэффициент полезного действия (КПД) редуктора ![]() =0,72
=0,72
![]()
По каталогу [1, приложение А] выбираем двигатель большей мощности ![]() и вписываем его паспортные данные в таблицу 1.3.
и вписываем его паспортные данные в таблицу 1.3.
Таблица 1.1 – Паспортные данные двигателя МИ-32
|
Pн |
номинальная мощность, (Вт) |
450 |
|
nн |
номинальная скорость вращения, (об/мин) |
1500 |
|
Uн |
номинальное напряжение, (В) |
110 |
|
Iн |
номинальный ток якоря, (А) |
5 |
|
Rд |
сопротивление цепи обмотки якоря, (Ом) |
0.975 |
|
Jд |
момент инерции якоря, (кг·м2) |
0.0142 |
|
hд |
КПД двигателя |
75 |
Последовательно определяем следующие величины:
1. wн – номинальная угловая скорость двигателя(1.2):
![]() , (1.2)
, (1.2)
![]() ,
,
2. Мн – номинальный момент двигателя(1.3):
![]() , (1.3)
, (1.3)
![]() ,
,
3. iр –оптимальное передаточное число редуктора(1.4):
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Физико-топологическая модель интегрального биполярного п-р-п-транзистора
- Биотропные параметры магнитных полей. Влияние естественных электромагнитных полей на живые организмы и механизмы воздействия
- Организация проектирования электронной аппаратуры. Техническая документация
- Анализ систем безопасности, использующих GSM каналы связи
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем