Структурная схема системы слежения за временным положением. Обобщенные функциональная и структурная схемы радиотехнических следящих систем
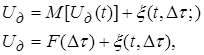
Ошибка слежения определяется выражением
![]() ,
,
где ![]() – временное положение отраженного импульса на входе следящей системы;
– временное положение отраженного импульса на входе следящей системы; ![]() – временное положение следящего (опорного) импульса
– временное положение следящего (опорного) импульса
(25 src="images/referats/6875/image002.png"> и
![]() измерены относительно опорного сигнала)
измерены относительно опорного сигнала)
На вход дискриминатора подается импульсная последовательность, но так как полоса пропускания следящей системы намного уже частоты следования импульсов, анализ можно проводить как для непрерывных процессов. Напряжение на выходе дискриминатора , усредненное за период повторения импульсов, может быть представлено в виде:
где ![]() ─ флюктуационная составляющая;
─ флюктуационная составляющая;
![]() =
=![]() ─ дискриминационная характеристика, определяемая как зависимость среднего значения напряжения на выходе дискриминатора от рассогласования (ошибки слежения).
─ дискриминационная характеристика, определяемая как зависимость среднего значения напряжения на выходе дискриминатора от рассогласования (ошибки слежения).
Форма этой характеристики определяется формой входного сигнала, полосой пропускания УПЧ, отношением сигнал-помеха на входе приемника, наличием флюктуаций сигнала и другими факторами.
При прямоугольных опорных и зондирующих сигналах дискриминационная характеристика имеет треугольную форму следующего вида (рис. 1) и формируется как разность двух взаимокорреляционных функций входного и опорного сигналов (рис.2).
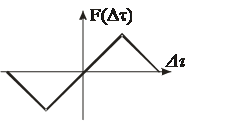
Рис. 1. Дискриминационная характеристика
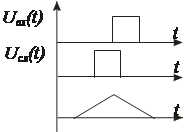
Рис. 2
Здесь длительность зондирующего импульса, равна длительности следящего импульса. Существует системы, в которых используется принцип укороченного строба. В этом случае опорные сигналы представляют собой короткие δ-импульсы (рис. 3). При этом дискриминационная характеристика имеет вид характеристики релейного типа. Это в основном используется в цифровой технике, в аналоговой технике трудно обеспечить достаточное усиление.
Рис. 3
Напряжение с дискриминатора поступает на ФНЧ с операторным коэффициентом передачи ![]() . Напряжение на выходе ФНЧ может быть представлено в виде:
. Напряжение на выходе ФНЧ может быть представлено в виде:
![]() ,
,
где ![]() .
.
Далее это напряжение подается на вход устройства регулируемой задержки, на выходе которого получаем:
![]() ,
,
где Sp – крутизна регулировочной характеристики устройства регулируемой задержки.
 при Uф = 0;
при Uф = 0;
![]() - величина задержки опорного сигнала при нулевом напряжении на управляющем входе устройства регулируемой задержки.
- величина задержки опорного сигнала при нулевом напряжении на управляющем входе устройства регулируемой задержки.
На основании полученных уравнений можем построить следующую структурную схему (рис. 4).
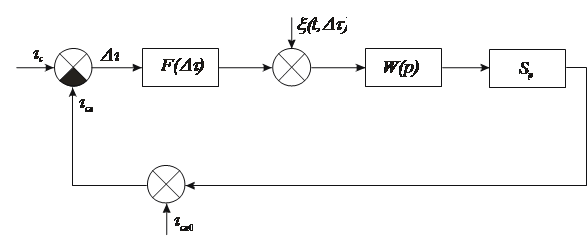
Рис. 4. Структурная схема системы слежения за временным положением импульсного сигнала
Нетрудно показать, что напряжение на выходе ФНЧ пропорционально расстоянию до зондируемого объекта (цели), то есть рассмотренная схема выполняет функцию следящего автодальномера.
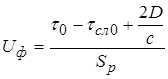
В режиме слежения цели величина ошибки слежения Δτ близка к нулю, тогда:
![]()
где τ0 – задержка зондирующего сигнала передатчика относительно опорного сигнала;
D – расстояние до цели;
с – скорость распространения радиоволн;
![]() - задержка сигнала при распространении к цели и обратно.
- задержка сигнала при распространении к цели и обратно.
![]() , т.е.
, т.е. ![]() ;
;
тогда
 .
.
Таким образом, при известных значениях величин τ0 ,τсл0 и Sp напряжение Uф – пропорционально дальности цели.
2. Система слежения за направлением прихода радиосигнала
(Угломерная следящая система)
Угломерные следящие системы используются в системах радионавигации, радиоуправления для слежения за угловым положением источника излучаемого или отраженного радиосигнала.
Функциональная схема системы имеет вид (рис.5):
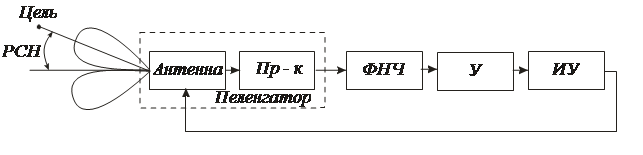
Рис. 5. Функциональная схема угломерной следящей системы:
Пр-к – приемник; ФНЧ – фильтр нижних частот; У – Усилитель; ИУ – исполнительное устройство
С помощью антенной системы формируются парциальные диаграммы направленности. РСН ─ равносигнальное направление; сигнал, принимаемый с этого направления двумя антеннами, имеет одинаковую интенсивность .
Местоположение источника излучения (цели) определяется двумя координатами: азимутом и углом места.
С помощью пеленгатора определяется рассогласование по углу между направлением на цель и РСН, и на выходе приемника формируется напряжение, пропорциональное величине и знаку этого рассогласования. Это напряжение, пройдя ФНЧ, который сглаживает высокочастотные составляющие, усиливается с помощью усилителя У и подается на исполнительное устройство. ИУ воздействует на антенную систему , в результате чего РСН изменяет свое положение в пространстве, уменьшая первоначальную ошибку. В качестве исполнительных устройств используются электромеханические, электронные и гироскопические ИУ.
Проведем математическое описание и составим структурную схему для слежения по одной координате. Обозначим:
![]() –угловое положение источника радиосигнала относительно опорного направления;
–угловое положение источника радиосигнала относительно опорного направления;
![]() – угловое положение антенны (равносигнального направления);
– угловое положение антенны (равносигнального направления);
Тогда ошибка слежения
![]() =
= ![]() ─
─ ![]() . (1)
. (1)
Напряжение на выходе пеленгатора :
![]() (2)
(2)
где ![]() ; (3)
; (3)
F(![]() )– зависимость среднего значения напряжения на выходе пеленгатора от ошибки слежения (пеленгационная характеристика).
)– зависимость среднего значения напряжения на выходе пеленгатора от ошибки слежения (пеленгационная характеристика).
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем