Структурная схема системы слежения за временным положением. Обобщенные функциональная и структурная схемы радиотехнических следящих систем
Будем полагать, что пеленгатор безынерционен.
Работу ФНЧ можно описать дифференциальным уравнением в сокращенной форме
![]() . (4)
. (4)
Далее сигнал поступает на безинерционный усилитель У, а затем на исполнительное устройство. При использовании электромеханического ИУ ( электродвигателя) его операторный коэффициент передачи опре
деляется выражением
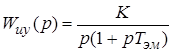
где К – крутизна зависимости угловой скорости вращения антенны в установившемся режиме от величины управляющего напряжения ![]() ;
; ![]() ─ электромеханическая постоянная двигателя.
─ электромеханическая постоянная двигателя.
Исполнительное устройство в первом приближении можно считать линейным и описать уравнением
![]() . (5)
. (5)
На основании формул (1) – (5) построим структурную схему (рис. 7).
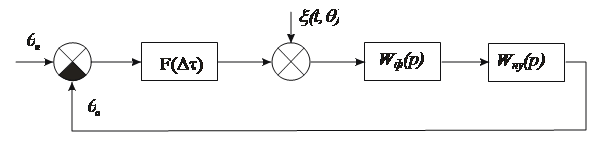
Рис. 7. Структурная схема угломерной следящей системы
На практике находят применение пеленгаторы с последовательным и одновременным сравнением сигналов. К первому типу относятся пеленгаторы, использующие принцип конического сканирования и переключения диаграммы направленности. Ко второму типу – моноимпульсные, формирующие четыре парциальные диаграммы направленности (по две в каждой из плоскостей).
Принцип конического сканирования: ось диаграммы направленности смещена относительно оси вращения и таким образом диаграмма направленности образует конус. Его медиана является равносигнальным направлением (РСН). При этом огибающая принимаемого радиосигнала приобретает амплитудную модуляцию с частотой, равной частоте вращения антенны. Амплитуда огибающей определяет величину угла отклонения РСН от направления на цель, а фаза – направление отклонения.
3. Обобщенные функциональная и структурная схемы радиотехнических следящих систем
Изучение основных типов систем позволяет определить общие функции и реализующие их функциональные узлы во всех рассмотренных выше системах и составить обобщенные функциональную и структурную схемы.
Обобщенная функциональная схема приведена на рис. 8 и состоит из дискриминатора Дис., фильтра, опорного (подстраиваемого) генератора ОГ.
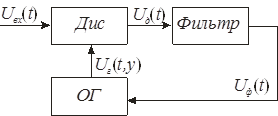
Рис.8. Обобщенная структурная схема радиотехнической следящей системы
На вход поступает смесь сигнала и шума
![]() .
.
Одним из параметров сигнала является задающее воздействие λ(t).
ОГ генерирует сигнал, одним из параметров которого является оценка отслеживающего параметра. Выходной сигнал ОГ зависит от назначения системы.
В результате нелинейного преобразования входного и опорного сигналов в дискриминаторе формируется напряжение, пропорциональное разности
![]() ,
,
где λ – задающее воздействие; y – управляемая величина.
Напряжение на выходе дискриминатора:
![]() ,
,
где F(x) – зависимость среднего значения напряжения на выходе дискриминатора от ошибки слежения, называемая дискриминационной характеристикой; ξ(t, x) – флюктуационная составляющая (результат нелинейного преобразования опорного и входного сигналов в дискриминаторе).
Форма дискриминационной характеристики приведена на рис. 9.
![]()
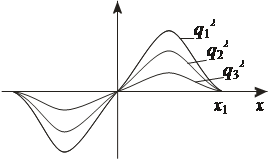
Рис.9. Дискриминационная характеристика
При малых значениях ошибки слежения х дискриминационная характеристика может быть аппроксимирована линейной зависимостью:
![]() ,
,
где
![]() при х=0.
при х=0.
Sд – крутизна, которая зависит от типа дискриминатора, отношения сигнал/шум ![]() и других факторов.
и других факторов.
 ,
,
где Рс – мощность сигнала; σ2ш – дисперсия шума.
![]() .
.
Крутизна дискриминационной характеристики зависит от амплитуды сигнала. Для исключения этой зависимости на входе производят ограничение либо автоматическую регулировку усиления ( АРУ). Дискриминационная характеристика имеет ограниченный раствор по оси х. Если ошибка превышает граничную, обратная связь размыкается и система выходит из режима слежения (![]() ). Для ввода в синхронизм используется устройство ввода , обеспечивающее
). Для ввода в синхронизм используется устройство ввода , обеспечивающее ![]() .
.
Фильтр осуществляет сглаживание высокочастотных составляющих. Он может содержать интегрирующие звенья, его передаточная функция определяет качественные характеристики системы.
Обобщенная структурная схема приведена на рис. 10.
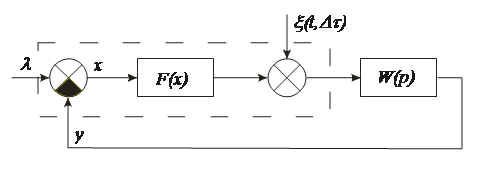
Рис. 10. Структурная схема радиотехнической следящей системы
Математический эквивалент дискриминатора включает элемент сравнения, нелинейное безинерционное звено F(x) и сумматор.
Звено W(p) определяется передаточной функцией опорного генератора и фильтра.
Характеристики составляющей шума ξ(t, x) зависят от параметров дискриминатора и предшествующих цепей, отношения сигнал/шум, метода нормировки сигнала и шума по амплитуде, характера амплитудных флюктуаций сигнала.
Изменение ошибки во времени описывается нелинейным стохастическим дифференциальным уравнением
х(t) + W(p)F(x) + ξ(t,x) - λ(t) = 0.
Нелинейность уравнения определяется нелинейностью функции F(x) и нелинейной зависимостью характеристик процесса ξ(t,x) от ошибки слежения х . Стохастичность – наличием случайного процесса ξ(t,x) и случайной составляющей задающего воздействия λ(t).
Если напряжение флюктуационной составляющей имеет равномерную спектральную плотность в полосе, значительно превышающей полосу пропускания следующих за дискриминатором цепей, шум ξ(t,x) можно считать белым и характеризовать его величиной спектральной плотности на нулевой частоте S ξ( w,x) = S ξ( o,x) , в общем случае зависящей от ошибки слежения. Зависимость спектральной плотности флюктуационной составляющей от ошибки слежения называется флюктуационной характеристикой дискриминатора.
Эквивалент дискриминатора можно существенно упростить при условии малости ошибки слежения х. При малой ошибке слежения дискриминационная характеристика линейна, а спектральную плотность флюктуационной составляющей можно принять с достаточным приближением не зависящей от ошибки слежения, то есть S ξ( о,x) = S ξ(x) , ξ(t,x) = ξ(t) . В этом случае следящая система описывается линейным дифференциальным уравнением с постоянными коэффициентами, что упрощает ее анализ.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем