Электрические датчики в современной металлургии
Механическая прочность пьезокерамики очень высока, но зависит от технологии и качества обработки соприкасающихся плоскостей. Пьезомодуль, диэлектрическая проницаемость и их стабильность зависят от выбора направления поляризации, направления действия силы F и съема заряда Q.
В настоящее время технология изготовления датчиков на пьезоэффекте сильно развивается.
3.2 Измерение крутящего
момента
Момент двигателя расходуется на работу по пластической деформации, на ускорение самого двигателя, валков и прокатываемой полосы, а также на преодоление аэродинамических потерь и потерь трения. Поэтому, хотя момент двигателя при постоянстве потока возбуждения характеризуется током якоря, этот ток далеко не однозначно определяет момент, затрачиваемый на прокатку.
Кроме того, при работе привода через шестеренную клеть, когда, например, оба валка четырехвалкового стана имеют привод от одного двигателя, распределение моментов между валками может существенно отличаться. Причин такого отличия много. Основным из них является различие диаметров рабочих валков и коэффициентов трения о полосу верхнего и нижнего рабочих валков.
Тензорезисторные измерители крутящего момента
При передаче крутящего момента круглым валом траектории главных деформаций (растяжение и сжатие) направлены под углом 45° к оси вала (рис. 8, а, б). Поэтому для измерения деформации кручения вала, а следовательно, и крутящего момента тензорезисторы наклеиваются на поверхность вала, как показано на рис. 8, в.
Четыре тензорезистора моста являются активными по отношению к измеряемому напряжению. Направление деформации зависит от направления действия скручивающего момента. Если момент приложен в направлении против часовой стрелки, как показано на рис. 8, а, сопротивления R1 и RЗ увеличиваются, а R2 и R4 уменьшаются, вызывая дисбаланс моста. Если момент действует в направлении по часовой стрелке, как показано на рис. 8, б, сопротивления R1, RЗ уменьшаются, а R
2и R4 увеличиваются, обусловливая дисбаланс моста в другую сторону.
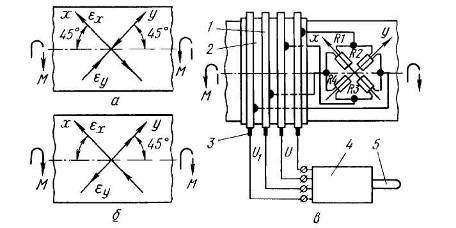
Рис. 8. Тензорезисторные измерители крутящего момента
Питание тензомоста напряжением U1 осуществляется через контактные кольца 1, закрепленные через изолирующие втулки 2 па вращающемся валу. Токосъемниками в данном случае могут быть графитовые щетки 3 или ртутные контакты. Сигнал дисбаланса моста U подается на теизоусилитель 4 и далее на устройство индикации или регистрации 5. Работа измерительных устройств, сигналы с которых передаются через трущиеся контакты, дает частые сбои из-за потери этого контакта. Кроме того, трущиеся контакты являются источником т. ЭДС, появление которой обусловливает дополнительную погрешность. Для ликвидации этой погрешности применяют различные бесконтактные системы питания и передачи информации с вращающегося вала на «наземную» аппаратуру.
Погрешность измерителей с помощью тензорезисторного моста не превосходит 1% от полной шкалы.
Магнитоупругие измерители момента
Принцип действия магнитоупругих измерителей крутящего момента основан на рассмотренном явлении возникновения анизотропии магнитной проницаемости под действием измеряемого момента (рис. 9). Под действием вращающего момента вал скручивается. В нем возникают растягивающие ![]() и сжимающие
и сжимающие ![]() напряжения. Магнитные сопротивления участков вала R1, R2, R3, R4, расположенные между катушками возбуждения A, B и измерительными катушками C и D, изменяются под действием механических напряжений, что приводит к дисбалансу магнитного моста, состоящего из этих сопротивлений. Напряжение дисбаланса является мерой измеряемого момента.
напряжения. Магнитные сопротивления участков вала R1, R2, R3, R4, расположенные между катушками возбуждения A, B и измерительными катушками C и D, изменяются под действием механических напряжений, что приводит к дисбалансу магнитного моста, состоящего из этих сопротивлений. Напряжение дисбаланса является мерой измеряемого момента.
Валы шпинделей главных приводов прокатных станов обычно имеют значительные размеры и вращаются с переменной скоростью при частом реверсировании. Поэтому простейший измеритель, приведенный на рис. 9, имеет значительную скоростную погрешность и погрешность, связанную с изменением расстояния от поверхности вала до возбуждающего и измерительного магнитопроводов. Изменение расстояния может быть вызвано эксцентриситетом, температурными деформациями, погрешностями монтажа и т.п.
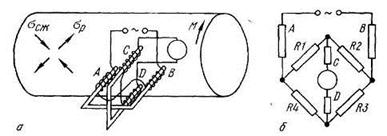
Рис. 9. Магнитоупругий измеритель момента
Промышленные измерители изготавливаются в виде кольца, расположенного вокруг вала, момент на котором контролируется. Такая конструкция представляет собой несколько магнитоупругих датчиков, что позволяет существенно снизить дополнительные погрешности. Имеются магнитоупругие измерители крутящего момента, выпускаемые шведской фирмой ACEA, известные под названием «тордукторы», измерители Института автоматики (г. Киев) и Южно-Уральского государственного университета.
3.3 Измерение натяжения полосы
Натяжение полос и лент на станах холодной прокатки и других агрегатах по их холодной обработке создается двигателями. Доля мощности, затрачиваемая на упругое растяжение полосы, различна.
Тем не менее, в ряде случаев именно по мощности двигателя судят о натяжении полосы. Погрешность в этих случаях относительно невелика, если, кроме создания натяжения, ток двигателя затрачивается на компенсацию аэродинамических потерь, потерь на трение и т.п. и можно применять электрические измерители натяжения, работающие, как правило, по току двигателя.
Если мощность двигателя расходуется на пластическую деформацию изменение скорости металла или на ускорение маховых масс узлов прокатного оборудования, то выделить долю тока, создающую натяжение, трудно, и погрешность измерения становится значительной.
В таких случаях применяют электромеханические измерители натяжения, в которых измерение осуществляется при помощи специального силоизмерительного датчика, вырабатывающего выходной сигнал, пропорциональный величине натяжения. Существует условное деление электромеханических измерителей натяжения полосы на прямые и косвенные.
Станина 1 двухвалковой клети установлена на гибких опорах 2, имеющих податливость в направлении прокатки. Силоизмерительный датчик 3, жестко закрепленный на фундаменте, воспринимает равнодействующую сил, действующих по оси прокатки. В первом приближении усилие F, воспринимаемое датчиком:
![]() ,
,
где T1 и T2 – натяжения полосы; ![]() – удельный вес прокатываемого металла; S – площадь поперечного сечения прокатываемой полосы; v – скорость прокатки;
– удельный вес прокатываемого металла; S – площадь поперечного сечения прокатываемой полосы; v – скорость прокатки; ![]() – относительное обжатие полосы.
– относительное обжатие полосы.
Отсюда следует, что при помощи силоизмерительного датчика можно измерять разность натяжений, приложенных к полосе, с погрешностью на величину силы, затрачиваемой на ускорение полосы вследствие ее обжатия в валках. Если намерять таким образом натяжение, создаваемое тянущими роликами, в которых обжатия не производится, то точность измерения будет вполне удовлетворительной. Если использовать прямой метод для измерения натяжения в четырехвалковой клети со смещенными осями рабочих валков, то дополнительная составляющая горизонтальной силы, обусловленная отклоне![]() нием равнодействующей усилия прокатки от вертикального направления, также будет являться погрешностью
нием равнодействующей усилия прокатки от вертикального направления, также будет являться погрешностью
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем