Электрические датчики в современной металлургии
Введение
Важнейшим фактором повышения эффективности прокатного производства в металлургической промышленности является развитие систем автоматического управления (САУ), как технологическим оборудованием, так и всем технологическим процессом в целом. Прокатное производство является сложным, консервативным процессом в металлургии, так как используется дорогостоящее технологическое об
орудование, работающее в сложной агрессивной среде.
Современные прокатные клети, станы оснащаются передовыми технологиями первичного сбора, преобразования и использования технической и технологической информации для повышения производительности и качества выпускаемой продукции.
В зависимости от выполняемых функций элементы САУ можно разделить на три группы: источники первичной информации (датчики), промежуточные и исполнительные устройства.
В системах автоматического управления в качестве сигналов обычно используются электрические и механические величины (например, постоянный ток, напряжение, давление сжатого газа или жидкости, усилие и т.п.), так как они позволяют легко осуществлять преобразование, сравнение, передачу на расстояние и хранение информации. В одних случаях сигналы возникают непосредственно вследствие протекающих при управлении процессов (изменения тока, напряжения, температуры, давления, наличия механических перемещений и т.д.), в других случаях они вырабатываются чувствительными элементами или датчиками.
Соответственно операциям, производимым с сигналами информации в автоматических устройствах, можно выделить функциональные ячейки – элементы. Элемент это простейшая в функциональном отношении ячейка (устройство, схема), предназначенная для выполнения очень простой по сути дела одной операции с сигналом.
Несмотря на простоту понятия элемента и происходящих в нем процессов, до сих пор во многих случаях существуют трудности не только в формировании понятия элемента, но и в терминологии.
Часто элементы отождествляются с устройствами, в состав которых входят несколько элементов. Например, некоторые датчики, называемые элементами, в действительности являются совокупностью элементов, объединенных единой схемой соединения, обеспечивающих воспроизведение контролируемой величины и преобразование ее в другую величину, более удобную для передачи по линиям связи.
1. Основные понятия и характеристики датчиков
Первичные измерительные преобразователи (в дальнейшем будем называть их датчиками) – это устройства, предназначенные для получения первичной рабочей информации о состоянии объекта. Они преобразуют физическую величину, характеризующую состояние объекта, в величину другого вида более удобного для передачи и дальнейшего преобразования.
В зависимости от принципа производимого датчиком преобразования (преобразования входной величины в выходную) их подразделяют в основном на два типа: параметрические и генераторные.
Параметрические (пассивные) – это датчики, в которых изменение контролируемой величины х (рис. 1) сопровождается соответствующими изменениями активного, индуктивного и емкостного сопротивлений. Наличие постороннего источника энергии вида z (рис. 1, б) является обязательным условием работы параметрического датчика. Параметрические датчики обычно подключаются по схеме Уитстона [3], которая представлена на рис. 4.
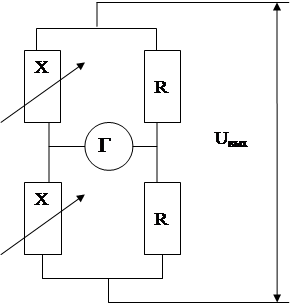
Рис. 1. Схема Уитстона
Переменный элемент Х (переменное плечо мостовой схемы) под действием физической величины изменяет свой параметр и тем самым разбалансирует схему включения других элементов R (постоянные плечи мостовой схемы). Схема питается от дополнительного источника энергии Г (например, генератора).
Генераторные (или активные) – это датчики, в которых изменение контролируемой величины х сопровождается соответствующими изменениями электродвижущей силы (ЭДС) на выходе датчика (например, возникновение ЭДС может происходить вследствие термо-, пьезо-, фотоэффекта и других явлений, вызывающих появление электрических зарядов). Эти датчики выполняются по схеме, приведенной на рис. 1, а, т.е. они не требуют дополнительного источника энергии вида z, так как энергия на выходе элемента полностью берется с его входа (вследствие чего мощность выходного сигнала всегда меньше мощности входного сигнала).
В зависимости от вида контролируемой неэлектрической величины различают датчики механические, тепловые, оптические и др. Часто применяются электрические датчики с промежуточным преобразованием, т.е. механический датчик объединяют с электрическим. Преобразование контролируемой величины в таких датчиках происходит по схеме: измеряемая величина – механическое перемещение – электрическая величина. Элемент, преобразующий измеряемую величину в перемещение, называется первичным преобразователем или источником первичной информации (ИПИ). Например, давление преобразуется в перемещение стрелки манометра ПИ, которое затем преобразуется в изменение активного сопротивления (проволочный, резистивный (или реостатный) датчики и др.).
Наиболее целостно о разнообразии ИПИ отражено в её классификации.
2. Классификация источников первичной информации
В настоящее время существует множество разнообразных по принципу действия и назначению ИПИ. Непрерывное развитие науки, техники и технологии приводит к появлению все новых источников первичной информации. Разобраться в этом многообразии помогают различные классификации. Создать универсальную классификацию, удовлетворяющую запросам всех возможных пользователей конкретной предметной области, – задача практически неразрешимая [1].
В качестве классификационных признаков ИПИ можно принять многие характеристики преобразователей: по виду используемой энергии, по виду входной и выходной величин, по принципу действия, по конструктивному исполнению, по типу переменных объекта управления и т.д.
Классификация:
1. По виду используемой энергии ИПИ можно подразделить на электрические, механические, пневматические и гидравлические.
2. По соотношению между входной и выходной величинами бывают различные виды ИПИ, например, электрический вход – неэлектрический выход; электрический вход – гидравлический выход и т.п.
3. В зависимости от вида выходного сигнала различают ИПИ аналоговые, дискретные, релейные, с естественным или унифицированным выходным сигналом.
4. По виду структурной схемы различают преобразователи прямого однократного преобразования, последовательного прямого преобразования, дифференциальные, с обратной связью (компенсационная схема).
5. По характеру преобразования входной величины в выходную ИПИ подразделяются на параметрические, генераторные, частотные, фазовые.
6. По виду измеряемой физической величины различают ИПИ линейных и угловых перемещений.
По физическим явлениям, положенным в основу принципа действия, в ГСП принята следующая классификация ИПИ:
– механические – с упругим чувствительным элементом, дроссельные, ротаметрические, объемные, поплавковые, скоростные;
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем