Автоматизация технологических процессов и объектов
Лекция № 1. Общие сведения о системах автоматического управления и регулирования. Основные принципы управления.
Задача управления заключается в том, чтобы объект управления (ОУ) в условиях реальной эксплуатации обеспечивал выполнение требуемых функций. Фактическое состояние объекта управления определяется одним или несколькими рабочими параметрами y(t). Чаще всего рабочие параметры
представляют собой физические величины: скорость (линейная и вращения), температура, напряжение электрического тока, линейные и угловые перемещения и т.д. В реальных условиях на объект управления оказывают влияние внешние воздействия, которые называются возмущающими z(t). Эти воздействия вызывают изменение внутреннего состояния объекта и как следствие - рабочих параметров. Вектор возмущающих воздействий подразделяется на 2 составляющие: измеряемое возмущающие воздействие и не измеряемое. В связи с этим для выполнения рабочих функций по заданным алгоритмам, необходимо на объект управления организовать подачу управляющих воздействий U(t) (рис. 1).
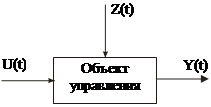 |
Рис. 1.1 Объект управления.
Y(t) - характеризует состояние процесса. Данный параметр надо поддерживать постоянным во времени или измерять по определённому известному закону.
U(t) – переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Обычно управляющими воздействиями служат изменения расхода материальных или энергетических потоков.
Заданный алгоритм обычно предусматривает поддержание рабочего параметра постоянным во времени или же изменение во времени по известному или неизвестному закону.
Задача управления, по существу, заключается в формировании такого закона изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий.
Для решения этой задачи используются три фундаментальных принципа управления: разомкнутое управление, управление по возмущению (принцип компенсации) и замкнутое управление (принцип обратной связи или управление по отклонению).
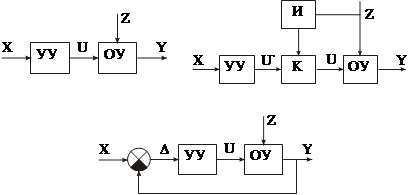
Структурные схемы принципов управления представлены на рис.1.2.
 а) б)
а) б)
в)
Рис. 1.2. Основные принципы управления
УУ - управляющее устройство; ОУ - объект управления;
И - измеритель возмущения; К - корректирующее устройство.
При разомкнутом принципе (рис.1.2, а) управляющее устройство вырабатывает сигнал управления U, который поступает на исполнительные элементы объекта управления. На вход управляющего устройства подается сигнал X, представляющий собой задание. Задание задается человеком или специальным задающим устройством. Данный принцип отличается простотой технической реализации, но оказывается малоэффективным при недостаточной информации о характере возмущения.
Для того чтобы учесть характер возмущений в процессе управления объектом, применяют управление по возмущению (рис.1.2, б). Здесь управляющее устройство, вырабатывает сигнал управления U в соответствии с заданием Х. Одновременно, производятся измерение возмущений, действующих на объект, и коррекция сигнала управления U. Полученный в результате коррекции сигнал управления U поступает на объект управления. Данный принцип является более эффективным по сравнению с разомкнутым управлением, при условии, что имеется техническая возможность измерения возмущающих воздействий. Указанное условие ограничивает применение данного принципа.
Принцип замкнутого управления (рис.1.2, в) позволяет решить задачу управления при любом характере действующих возмущений.
В этом случае сигнал задания поступает на один из входов элемента сравнения, на другой вход которого по цепи обратной связи подается измеренное с помощью датчиков фактическое значение рабочего параметра объекта управления. На выходе элемента сравнения имеем сигнал D (ошибку, отклонение), который является разностью между заданным и фактическим значениями параметров, т.е. D=Х-Y. Управляющее устройство в зависимости от величины и знака ошибки вырабатывает сигнал управления. Таким образом, принцип замкнутого управления учитывает не только задание, но и фактическое состояние объекта и действующих возмущений. Поэтому данный принцип является наиболее универсальным и позволяет успешно решать задачи управления, несмотря на неопределенность объекта управления и характера возмущений. Класс автоматических систем, построенных на основе принципа замкнутого управления, получил название систем автоматического регулирования (САР),
Примером таких систем являются системы автоведения поезда. В этих системах на борт локомотива с помощью канала связи передается заданная скорость Vз применительно к конкретному участку. Эта скорость вычисляется специальным устройством и зависит от расстояния до впередиидущего поезда, от состояния верхнего строения пути, типа локомотива, веса состава, профиля участка и т.д. На борту локомотива производится измерение фактической скорости Vj и сравнение с заданной. Если Vз>Vj то происходит включение тяговых двигателей, в противном случае включаются тормозные средства.
Свойство универсальности САР позволяет предположить, что структура замкнутого управления в неявном виде широко представлена в технике и природе.
Лекция №2. Законы регулирования
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U=f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора и основные качественные и количественные характеристики систем.
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон, и регулятор в этом случае называют П-регулятором. При этом U=U0+kD, где U0-постоянная величина, k-коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами.
Интегральный закон регулирования и соответствующий И-регулятор реализует следующую зависимость:
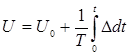 ,
,
где Постоянная времени интегрирования.
Техническая реализация И-регулятора представляет собой усилитель постоянного тока с емкостной отрицательной обратной связью. И - регуляторы обеспечивают высокую точность в установившемся режиме. Вместе с тем И-регулятор вызывает уменьшение устойчивости переходного процесса и системы в целом.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода