Анализ случайных процессов в линейных системах радиоэлектронных следящих систем
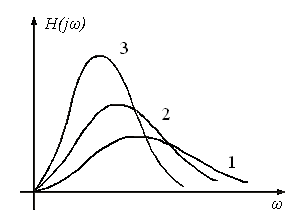
Рис.2. Зависимость АЧХ от постоянной времени инерционного звена.
Используя (4) можно оптимизировать параметры системы, в частности ![]() по критерию минимума флюктуационной ошибки. С этой целью продифференцируем (6.4) по
по критерию минимума флюктуационной ошибки. С этой целью продифференцируем (6.4) по ![]() и приравняем производную нулю.
и приравняем производную нулю.

 ;
;
![]() ;
;
![]() ;
;
![]() ;
;  ;
;
при  ;
;  ;
;
Подставив ![]() в (4), получим
в (4), получим
 ,
,
где ![]() - собственная частота следящей системы.
- собственная частота следящей системы.
Если задающее воздействие представлено спектральной плотностью неточность его воспроизведения также оценивается дисперсией. Рассмотрим пример (рис.3).
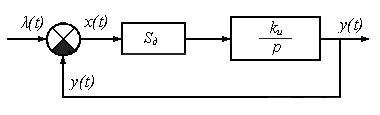
Рис.3
Пусть ![]() ;
; ![]() ,
,
где ![]() ─ дисперсия задающего воздействия;
─ дисперсия задающего воздействия;
![]() - параметр, определяющий ширину спектра.
- параметр, определяющий ширину спектра.
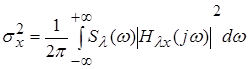
Определим величину дисперсии ошибки слежения ![]() , обусловленную неточностью воспроизведения задающего воздействия.
, обусловленную неточностью воспроизведения задающего воздействия.
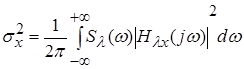 ;
;
 ,
,
где![]() ;
; ![]() - коэффициент передачи интегратора;
- коэффициент передачи интегратора;
![]() - крутизна дискриминационной характеристики.
- крутизна дискриминационной характеристики.
 ;
;  ;
;
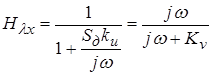
приведем выражение к стандартному виду:
![]() ;
;
![]() (jw) =(
(jw) =(![]() +jw) (Kv+jw) =(jw) 2 +(
+jw) (Kv+jw) =(jw) 2 +(![]() +Kv) jw+
+Kv) jw+![]() Kv;
Kv;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
 ;
;  ;
;
При увеличении ![]()
![]() уменьшается, в то время как в первом примере
уменьшается, в то время как в первом примере ![]() увеличивается.
увеличивается.
Эквивалентная шумовая полоса следящих систем
Под эквивалентной шумовой полосой следящей системы понимают полосу пропускания эквивалентной системы, имеющей прямоугольную АЧХ, одинаковое с исходной системой ее значение на нулевой частоте и одинаковую дисперсию на выходе при воздействии на входы систем белого шума (рис.4).
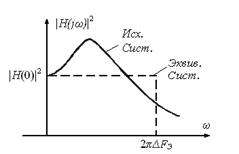
Рис.4. АЧХ исходной и эквивалентной систем.
Чтобы определить полосу пропускания ![]() используем условие равенства дисперсий:
используем условие равенства дисперсий:

Отсюда
 .
.
Использование значения эквивалентной шумовой полосы позволяет упростить вычисление дисперсии:
![]() ;
; ![]() .
.
Если ![]() , то
, то ![]() , или
, или ![]() ,
,
где ![]() ─ односторонняя спектральная плотность.
─ односторонняя спектральная плотность.
Формулы для расчета эквивалентной шумовой полосы систем приведены в табл.1
Таблица 1. Формулы для расчета эквивалентной шумовой полосы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оптимизация параметров следящих систем
Для решения задачи оптимизации необходимо определить структуру системы, предъявляемые требования и ограничения, накладываемые на систему, описать воздействия и возмущения, выбрать критерий оптимизации и метод.
Оптимизируем параметры kи2 и T1 в системе (рис.5), в которой задающее воздействие λ(t) – детерминированная функция, а возмущение ─ случайный процесс ξ(t).
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Идентификация и моделирование технологических объектов
- Астигматизм и кривизна изображения. Хроматические аберрации
- Биотропные параметры магнитных полей. Влияние естественных электромагнитных полей на живые организмы и механизмы воздействия
- Развитие сотовых сетей радиосвязи с подвижными объектами
- Проектирование генератора высоких частот
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем