Идентификация и моделирование технологических объектов
Идентификация параметров электромеханической системы
Введение
Цель работы: приобрести навыки определения постоянных времени системы по переходной характеристике.
Дано:
-передаточную функцию электромеханической системы:
 ;(1)
;(1)
-постоянные времени Т1=1, Т2=10;
-уравнения изменения скорости двигателя посто
янного тока W(t):
 ;(2)
;(2)
где  - относительное время процесса;
- относительное время процесса;
- коэффициент, который характеризует степень расхождения постоянных времени Т1 и Т2;
 - коэффициент демпфирования;
- коэффициент демпфирования;
Тм, Тя - электромеханическая и электромагнитная постоянные времени двигателя соответственно, причем Тм=Т2 в уравнении (1).
Ход работы
1. Соответственно заданных данных и передаточной функции системы строим функциональную схему системы, используя среду Matlab. Схема представлена на рисунке 1.
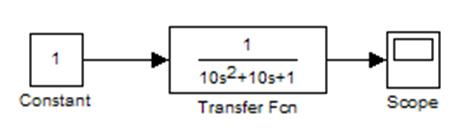
Рисунок 1 - Функциональная схема.
2. График переходного процесса представленный на рисунке 2.
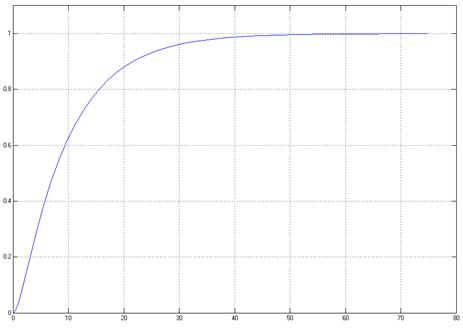
Рисунок 2 - График переходного процесса.
По графику переходной функции (рисунок 2) определим время t1 при ![]() получили t1=11.95.
получили t1=11.95.
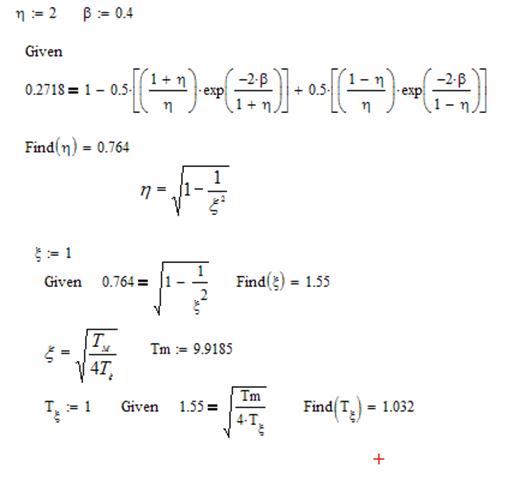
Вычисляем ТМ с помощью формулы
 ,
,
получили ТМ= 9,9185, ![]() .
.
3. При ![]() , необходимо определить из графика
, необходимо определить из графика ![]() и решить уравнение (2) относительно h, а потом определить
и решить уравнение (2) относительно h, а потом определить ![]() . Получили значение
. Получили значение ![]()
4. Рассчитываем значение Тя
5. Определим ошибки идентификации за формулами:
![]() и
и 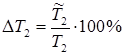
![]()
![]()
Выводы: в ходе работы было определено постоянные времени по переходной характеристике, установлен что коэффициент, который характеризует различие постоянных времени не влияет на относительное время при разгоне двигателя к заданному единичному уровню, экспериментально получении значения постоянных времени почти совпадают с заданными.
Моделирование нелинейных объектов
Цель работы: Приобрести навыки моделирования нелинейных объектов. А также анализа их влияния на точность системы
Исходные данные:
тип двигателя: ПБВ 132;
номинальный момент: 35 Н·м;
номинальная скорость: 600 об/мин;
номинальная мощность: 2,2 кВт;
номинальное напряжение: 53 В;
номинальный ток: 50 А;
максимальный момент: 350 Н·м;
максимальная скорость: 2000 об/мин;
момент инерции якоря: 0,188/0,1901 кг/м2;
максимальное теоретическое ускорение: 1860 м/с2;
электромеханическая постоянная времени: 14,2 мс;
электромагнитная постоянная времени: 7,35 мс.
величина люфта: 2b=0.004.
Теоретические сведения
Люфт в кинематических передачах приводов подач станков может вызывать потерю устойчивости системы управления и ухудшение динамических показателей. Кроме этого он вызывает искажение траектории контурного движения и снижает точность обработки.
Структура механизма с нелинейностью типа «люфт» содержит нелинейный элемент, геометрическая модель которого описывается соотношениями:
![]() при
при ![]() ,
,
где Х – входная величина нелинейного звена; ХН – выходная величина нелинейного звена; 2b – величина люфта.
Ход работы:
С применением пакета Matlab составляем модель электромеханической системы, схема которой представлена на рисунке 1.
Рисунок 1 – Схема электромеханической системы в среде Matlab
Расчёты всех коэффициентов используемых в электромеханической системе, произведенные при помощи пакета MathCAD, приведены ниже.
Активное сопротивление якоря:

Конструктивный коэффициент:
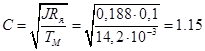 .
.
Определяем параметры входных воздействий:
Амплитуда входного воздействия ![]() , пусть
, пусть
А=1;
Частота входного воздействия
 ,
,
принимаем
![]() .
.
Входное воздействие будет иметь вид:
![]() .
.
Эпюры сигналов на входе и выходе звена модели с нелинейным элементом типа «люфт», полученные при помощи пакета Matlab, изображены на рисунке 2.
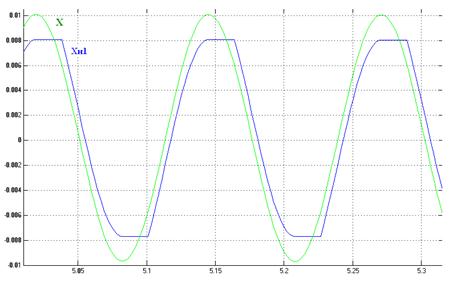
Рисунок 2 – Графики сигналов на входе и выходе звена типа «люфт» в среде Matlab
При моделировании систем с нелинейностями типа «люфт» нелинейное звено заменяется эквивалентным звеном с передаточной функцией
![]()
которая называется гармонической передаточной функцией нелинейного звена.
Коэффициент передачи нелинейного звена и фазовая характеристика определяются выражениями:
![]()
 .
.
Коэффициенты гармонической линеаризации в функции ![]() , характеризующие соотношения амплитуд синфазной
, характеризующие соотношения амплитуд синфазной ![]() и квадратурной
и квадратурной ![]() составляющих первой гармоники выходного сигнала ХН1 к амплитуде А сигнала на входе Х:
составляющих первой гармоники выходного сигнала ХН1 к амплитуде А сигнала на входе Х:

Тогда передаточная функция примет вид:
![]() .
.
Модель замены люфта линейным элементом в среде Matlab изображена на рисунке 3.
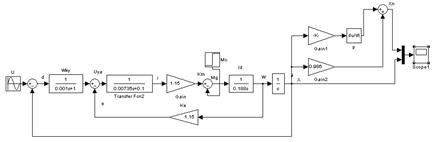
Рисунок 3 – Схема модели замены люфта линейным элементом
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем