Идентификация и моделирование технологических объектов
Полученные эпюры сигналов на входе в линейное замещённое звено типа «люфт» и на его выходе изображены на рисунке 4.
|

Рисунок 4 – Графики сигналов на входе в линейное замещённое звено типа «люфт» и на его выходе
Составим модель компенсации люфта и проведём её исследование, схема модели в среде Matlab изображена на рисунке 5.
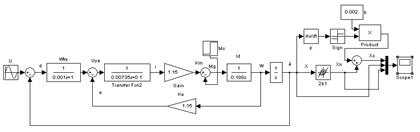
Рисунок 5 – Схема модели компенсации люфта в среде Matlab
Полученные эпюры сигналов на входе (выходе) звена типа «люфт» и после компенсации изображены на рисунке 6.
|
|
|
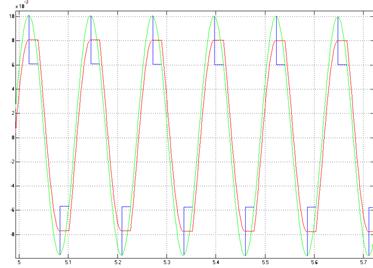
Рисунок 6 – Графики сигналов на входе звена типа «люфт» и после компенсации в среде Matlab
Выводы: в ходелабораторной работы я приобрел навыки моделирования нелинейного объекта типа «люфт», проанализировала их влияние на точность системы, составила и исследовала модель для компенсации люфта.
Оптимизация параметров пид-регуляторов для объектов управления с нелинейностями
Цель работы: освоение пакета прикладных программ Nonlinear Control Design (NCD) Blockset системы MATLAB для автоматической настройки параметров моделируемых систем электроприводов в условиях ограничений.
Индивидуальное задание:
Коэффициенты передаточной функции:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Неопределенный параметр ![]() в диапазоне 0,2…0,5.
в диапазоне 0,2…0,5.
Желаемые параметры качества переходного процесса δ=±5%; σ=1,2; tпп=1,5 с
Ход работы
Передаточная функция объекта (электропривода):
![]()
Коэффициент интегральной составляющей:
![]() .
.
Коэффициент дифференциальной составляющих:
![]() .
.
Пропорциональная составляющая (предельное значение):
![]() .
.
Строим исследуемую схему в среде MatLab.
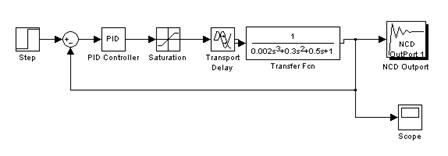
Рисунок 1 – Структурная схема модели для оптимизации ПИД-регулятора
Графики переходного процесса с оптимизированными параметрами ПИД-регулятора, представлены на рисунках 3-4.
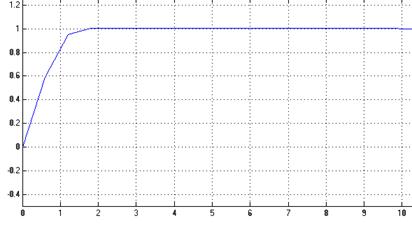
Рисунок 3 – График переходного процесса для заданной модели (Scope)
Параметры системы при оптимизации:
Start time: 0 Stop time: 60.
There are 2405 constraints to be met in each simulation.
There are 3 tunable variables.
There are 1 simulations per cost function call.
Creating a temporary SL model tp484964 for computing gradients .
Creating simulink model tp484964 for gradients .Done
f-COUNT MAX{g} STEP Procedures
7 -0.01 1
14 -0.01 1 Hessian modified twice
15 -0.01 1 Hessian modified twice
Optimization Converged Successfully
Active Constraints:
1203
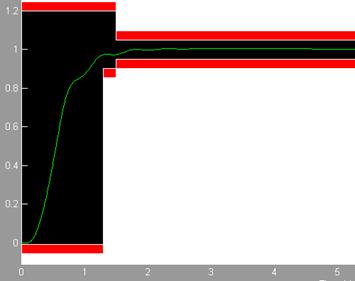
Рисунок 4 – График переходного процесса для заданной модели (NCDOutPort)
Вывод: в ходе лабораторной работы я изучил пакет прикладных программ Nonlinear Control Design (NCD) Blockset системы MATLAB для автоматической настройки параметров моделируемых систем электроприводов в условиях ограничений, научился решать задачи оптимизации при наличии ограничений какого-либо коэффициента системы.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем