Идентификация технологических объектов управления
После решения системы уравнений (3.5) или ее динамического аналога она принемает вид:
 (3.6)
(3.6)
где ci — вещественный коэффициент для уравнений статики или передаточная функция для уравнений динамики.
Модель системы в виде уравнений (3.5) или (3.6) может быть определена любой внутренней структурой, т.е. связи между канал
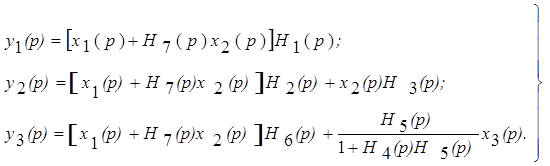
ами могут быть обусловлены непосредственным взаимодействием переменных, прямыми связями входа с различными выходами и обратными связями от выходов к входам. На рис. 3.1 приведена система, обладающая указанными свойствами. Эту систему можно описать следующими уравнениями:
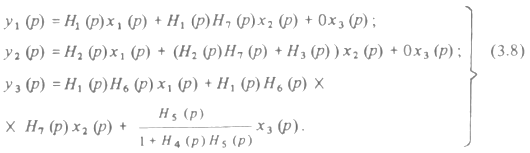
После преобразований система (3.7) принимает вид, аналогичный (3.6):
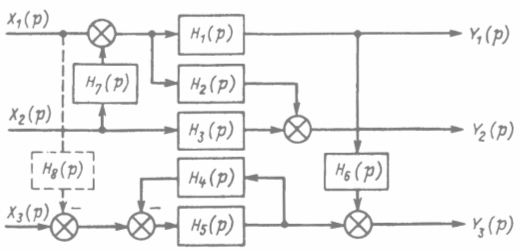
Рисунок 3.1 – Пример трехсвязной структуры
Как видно из изложенного, даже для относительно простой системы запись формальной модели получается весьма громоздкой. После приведения ее к виду (3.6) решать систему обычным способом становится сложно. С увеличением числа входов и выходов задача еще более усложняется.
Для получения более компактных и унифицированных форм представления моделей многомерных систем применяется матричная форма записи переменных и операторов преобразования.
Например, система (3.5) в матричной форме может быть представлена в виде
AY = ВХ, (3.9)
где X, Y - матрицы входных и выходных переменных; А, В - матрицы преобразований.
Система (3.6) принимает вид
Y = СХ. (3.10)
Под матрицами в данном случае понимается упорядоченная, т.е. выполненная по определенному правилу, табличная форма записи цифр, буквенных коэффициентов или передаточных функций и полиномов. Так, в (3.10) матрицы имеют вид:
Главное преимущество матричной формы записи заключается в том, что, составляя матрицы по определенным правилам, можно трансформировать в матричную форму не только запись переменных, но и операции над ними.
При наличии некоторых навыков операции над матрицами также легче воспринимаются, чем операции с множеством переменных. Математическое обеспечение современных ЭВМ располагает программами, ориентированными на унифицированное матричное представление задач анализа и синтеза многомерных систем, что позволяет широко применять для этих целей современную вычислительную технику.
Использование матричного представления объекта весьма эффективно при анализе и синтезе системы по динамическим показателям. Одним из наиболее современных методов анализа динамики много мерных систем является метод пространства состояний. Под переменными состояния и образуемым ими пространством состояний понимается совокупность величин, позволяющих по известным входным сигналам для t > t0 определить выходные сигналы для t ≥ t0.
В качестве переменных состояния могут приниматься как выходные переменные, так и их производные. Так, для одномерной системы, описываемой дифференциальным уравнением л-го порядка, переменными состояния будут значения у и (n – 1) производных в момент t = 0, позволяющие в дальнейшем при решении дифференциального уравнения классическим методом определить постоянные интегрирования.
Для многомерной системы понятие переменных состояния рассмотрим на примере электропривода с системой управления преобразователь - двигатель при действии на преобразователь двух управляющих воздействий и1 и и2. Динамическая модель такой системы имеет вид:
 (3.11)
(3.11)
Выберем в качестве переменных состояния интересующие нас величины, приняв их выходами системы, и обозначим их

Запишем выражения для динамической модели объекта в виде системы дифференциальных уравнений в канонической форме:
 (3.12)
(3.12)
Применительно к примеру система будет иметь вид:
 (3.13)
(3.13)
или в матричной форме
![]()
или, если раскрыть матрицы

Здесь Y(f) - столбец неизвестных выходных функций времени или переменных состояния; F (t) — столбец задающих (входных) функций времени; А, В — квадратные матрицы постоянных коэффициентов.
Сравнивая (3.14) с записью дифференциального уравнения первого порядка и располагая формулой его решения
И располагая формулой его решения

где τ — переменная интегрирования, можно доказать, что и для матричного выражения системы дифференциальных уравнений можно напирать аналогичное выражение для ее решения. Здесь матричная экспоненциальная функция еAt может быть представлена рядом системы уравнения вида:

Здесь матричная экспоненциальная функция еAt может быть представлена рядом:

Требуемые для получения временных функций суммирование и умножение матриц выполняются на ЭВМ по типовым программам.
Как и одномерные системы, многомерные решают задачи стабилизации совокупности параметров, программно-следящего их изменения или оптимизации.
Специфичным для многомерных систем является возможность неравенства числа входов и выходов, обычно пу ≤ пх, а также взаимовлияние каналов друг на друга. Формально это взаимовлияние представляется в виде перекрестных связей с передаточными функциями Н2 (р), Н6(р), Н7 (р) на рис. 3.1. Если они являются объективным проявлением природы управляемого объекта, они называются естественными. Если введены специально, например, для нейтрализации взаимовлияния — искусственными или корректирующими.
Например (рис. 3.1), для компенсации влияния y на y3 представ ленного в виде естественной связи с передаточной функцией Н6 (р), необходимо на вход х6 подать с входа Х корректирующую связь с передаточной функцией

Тогда выражение для уъ (р) в (3.8) примет вид
или

Здесь уъ становится независимым от х i.
Рассматривая систему (3.8), можно ввести понятие передаточной матрицы является собственными передаточными функциями. Они отражают зависимость выхода от "своего" входа; остальные (обозначим их L) являются несобственными. Тогда
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Экранирование электромагнитных полей, узлов радиоэлектронной аппаратуры и их соединений. Материалы для экранов
- Разработка системы управления освещением при помощи любого пульта дистанционного управления от бытовой аппаратуры
- Структурированная кабельная система на 292 порта зданий гимназии
- Расчёт интегральной микросхемы
- Моделирование многокаскадного транзисторного усилителя
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем