Идентификация технологических объектов управления
АНАЛИТИЧЕСКИЕ МЕТОДЫ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ
Модели элементов
Аналитические методы традиционны при рассмотрении формальных моделей элементов электропривода и в связи с этим наиболее знакомы студентам. Они базируются на знании фундаментальных закономерностей электромеханического преобразования энергии. Аналогичный под ход возможен и при использовании гид
равлических и пневматических приводов, он может быть распространен на элементы рабочего технологического оборудования.
Любая сложная силовая структура, состоящая из нескольких контуров, в которых происходит преобразование энергии из одного вида в другой, может быть разбита на отдельные элементы. Каждый из них осуществляет получение энергии, ее накопление, передачу другому элементу, расходование на полезную работу или рассеивание некоторой части энергии в виде потерь.
Знание природы элементов позволяет математически описать процессы преобразования энергии. Обобщив различные методики и формализовав связи одного элемента с другим, можно получить уравнения, описывающие процессы в сколь угодно сложных и разнородных силовых структурах технологических процессов. Рассмотрение только технологических процессов формообразования позволяет остановиться на системах с сосредоточенными параметрами и элементами.
Для получения обобщенных моделей элементов с сосредоточенными параметрами введем понятие разности потенциальных уровней U. Будем понимать под этим расход энергии на единицу преобразованного продукта. Введем также переменную количества Q — численную меру объема преобразуемого продукта. Произведение этих величин даст работу, необходимую для изменения на U потенциальных уровней количества продукта Q:
UQ = А.
Мощность, расходуемая на изменение потенциального уровня со скоростью dQ / dt, определяется соотношением

Для иллюстрации приведены уравнения электрической и механической цепей:
электрическая цепь:
Или
где q — заряд; R, L, С - активное сопротивление резистора, индуктивность катушки и емкость конденсатора, включенных в цепь;
механическая цепь:
или
где J — момент инерции;
θ,ω — угол и угловая скорость двигателя;
β = Мп /ω0 — жесткость механической характеристики двигателя;
к = M/a — жесткость кинематического звена. Второе слагаемое второго уравнения момента характеризует суммарный момент сопротивления Мс.
Элементы, связанные соединениями, в которых не происходит накопления и преобразования вещества или энергии, образуют структуру системы, отражающую технологический процесс преобразования этих видов продуктов. Для анализа такой структуры используются два закона: сумма расходов продукта в любом разветвлении равна 0:
сумма разностей уровней потенциалов в любом контуре равна 0:
 (3.2)
(3.2)
Решение уравнений типа (3.2) и (3.3) может дать принципиально разные результаты.
Если многоконтурная система имеет один вход и один выход, то система дифференциальных уравнений первого порядка, описывающих процессы в элементах, даст дифференциальное уравнение, порядок которого определяется числом накопителей энергии в системе.
Технологические объекты управления, как правило, являются многосвязными системами, имеющими несколько входов и выходов. Для них характерна зависимость каждого выхода от всех входов системы. Математическая модель такой системы представляет собой систему дифференциальных уравнений различного порядка, в левой части каждого из этих уравнений фигурирует одна из выходных переменных, а в правой — все входные. Для анализа подобных систем их математические модели обычно представляют в матричной форме.
Модели многосвязных систем
Для современных АСУ ТП характерно объединение в единую систему отдельных приводов и механизмов и даже объединение сложных технологических агрегатов в комплексно-автоматизированные технологические линии, гибкие автоматизированные производства. Примерами первых могут служить станки с ЧПУ, отрабатывающие при обработке детали сложные траектории и обеспечивающие оптимальный режим резания; примерами вторых — технологические линии прокатного производства. Основной особенностью таких систем является невозможность рассмотрения их как механической совокупности от дельных механизмов. Это обусловлено взаимосвязью и взаимовлиянием друг на друга управляемых технологических параметров.
Для обеспечения требуемого качества продукции необходимо одно временно управлять многими взаимосвязанными переменными (технологическими параметрами) путем непрерывного воздействия на различные исполнительные механизмы. В подобных системах изменение одного управляющего или возмущающего воздействия вызывает изменение нескольких управляемых переменных и наоборот - каждая управляемая переменная зависит от нескольких управляющих воз действий. Многосвязными являются большинство систем, у которых есть несколько возможностей управлять одним объектом, подверженным обычно нескольким внешним воздействиям. Подобные системы называют также многоканальными или многомерными.
В многоканальных системах в отличие от одноканальных входные воздействия и выходы объекта в каждый момент времени описываются как многомерные векторы, а сам объект — оператором А, пре образующим вектор входных воздействий X в вектор выходных переменных Y:
Y = АX. (3.4)
В этом случае можно говорить об аналогии между оператором А и передаточной функцией в одноканальных системах. В многоканальных системах решаются те же задачи, что и в одноканальных, т.е стабилизация, программное и следящее управление, оптимизация. Здесь также решается вопрос об устойчивости системы, качестве ее динамики. Представляя систему многомерной, необходимо уметь путем структурных преобразований упрощать внутреннюю структуру сложной системы, соединять ее с другими системами и т.д. Самостоятельной задачей является получение и представление формализованных моделей таких систем.
Основным физическим принципом, положенным в основу аналитических методов получения моделей многомерных объектов, является метод универсальных уравнений.
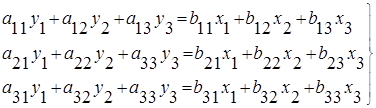
Записав уравнения по типу (3.2), получим, например, для установившегося режима трехсвязной линейной системы уравнения вида:
 (3.5)
(3.5)
где х1,х2,х3 – входные, а у1,у2,у3 – выходные переменные; aij, bij – коэффициенты – вещественные числа, которые могут принимать также и нулевые значения.
При записи уравнений динамика структуры системы уравнений будет аналогичной (3.5), но вместо yi и xi будут фигурировать временные функции xi (t) и yi (t) или их операторные изображения xi (p) и yi (p), а вместо коэффициентов aij, bij – оперторные полиномы.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем