Идентификация технологических объектов управления
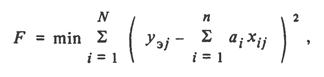
Оптимальной может считаться модель, у которой при определенных расчетом коэффициентах сумма квадратов отклонений расчетных ур и экспериментальных уэ значений будет минимальной, т.е. минимизируется функционал

где п — число опытов.
Для определения коэффициентов модели составляют систему уравнений ти
па
![]()
Совместное решение полученных уравнений относительно ai дает такие их значения, при которых удовлетворяется условие (3.15).
Для упрощения (3.16) целесообразно начало отсчета абсциссы xi помещать в середину интервала экспериментально снятых значений и пользоваться симметричными значениями xi (одинаковыми, но раз личными по знакам). В этом случае все суммы нечетных степеней х будут обращаться в нуль, что существенно упростит систему уравнений.
Например, если в качестве модели выбран полином второй степени
![]()
то функционал (3.15) имеет вид

Коэффициенты являются неизвестными переменными. В соответствии с (3.16) составляем систему уравнений:
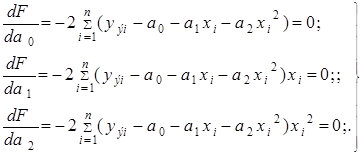
Приравнивая суммы нечетных степеней xi к нулю, получаем
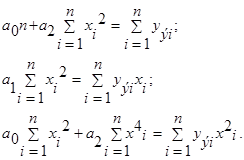
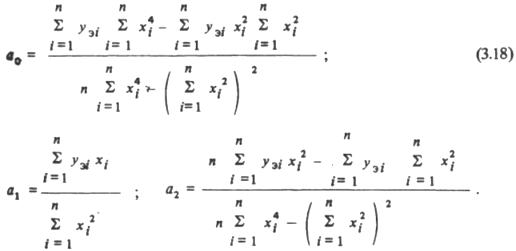
Решение относительно коэффициентов:
Рассчитав коэффициенты и подставив их в (3.16), получим уравнение регрессии.
Идентификация многомерных объектов
Получение модели многомерных объектов по результатам эксперимента осложняется прежде всего тем, что на исследуемый параметр влияет много факторов, которые сложно разделить на существенные и несущественные, поэтому трудно определить число входов объекта, подлежащих учету.
В отличие от одномерных объектов затруднена геометрическая интерпретация модели. Так, для двух входных параметров, влияющих на третий выходной, приходится обращаться к двухмерной области. Увеличение входов требует рассмотрения многомерной гиперповерхности, описываемой уравнением с несколькими аргументами и не поддающейся геометрической интерпретации.
Вместе с тем модель, отражающая зависимость исследуемого параметра или критерия от многих переменных, должна быть достаточно информативной, достоверной и удобной в пользовании.
При значительном числе входов xi модель может быть нелинейной и иметь сложный рельеф с вершинами, впадинами, гребнями. Поиск экстремальных точек (вершин и впадин) на этой поверхности путем изменения входных величин составляет содержание оптимального управления. Обычно такая модель называется целевой функцией или поверхностью отклика, а оптимальное управление обеспечивает работу технологического объекта управления в области экстремального значения критерия качества.
Получить по данным эксперимента модель объекта управления, точно воспроизводящую поверхность отклика, весьма сложно. Поэтому на практике часто ограничиваются ее линейным или квадратичным приближением, выбирая диапазон изменения переменных в ограниченной области. Это возможно, если функция непрерывная и выпуклая. Границы области обычно выбирают так, чтобы в нее попал экстремум или предельно допустимые значения y и xi.
Такой подход может дать в большей степени качественное, нежели количественное решение. Оно сводится к оценке влияния различных факторов на исследуемую переменную y и дает возможность пренебречь некоторыми из них.
Метод, позволяющий получить многомерную модель объекта управления на основе эксперимента, получил название факторного анализа, нередко он называется методом планирования эксперимента, факторным экспериментом и т.п. Применительно к детерминированному объекту метод заключается в следующем:
- для объекта выбирают факторы хi, оказывающие существенное влияние на выход у; определяют области изменения хi;
- составляют программу (план) эксперимента;
- принудительно изменяя xi в избранных пределах и сочетаниях, определяемых программой эксперимента, фиксируют значения у;
- рассчитывают коэффициенты уравнений модели.
Основными условиями проведения эксперимента являются:
- выбор независимых друг от друга входных величин хi
- возможность и наблюдаемость изменения у;
- возможность задания хi с точностью, превышающей точность измерения у.
При постановке задачи выбирается центр области варьирования с координатами у0, х1 0, х2 0 … и устанавливаются границы области варьирования. По возможности область выбирается меньшей, что повышает точность модели. Выбор границ осуществляется с учетом влияния помех, так чтобы последние были намного меньшими, чем планируемое отклонение входной величины ximax или xi min от начального значения хi 0.
Природа объекта управления такова, что xi могут иметь различные физическую природу и размерность. Поэтому желательно пользоваться относительными величинами входных переменных. В качестве базовых удобно выбирать предельные отклонения ∆хi.
В этом случае

При таком подходе ось у помещается в центр идентифицируемой области, для которой
![]()
План проведения эксперимента и методика расчета коэффициентов зависят от выбранного типа модели. В наиболее часто встречающемся виде многомерная модель представляется степенным полиномом, содержащим также члены, учитывающие совместное действие факторов. Модель, порядок которой не превосходит второго, имеет вид
![]()
Г
де х0 — фиктивная переменная, вводимая для унификации членов модели и всегда равная 1.
После выбора типа модели определяется объем эксперимента. Необходимо установить, сколько раз, в какой последовательности и в каких различных сочетаниях надо изменять хi чтобы при минимальном объеме эксперимента получить достаточно достоверный результат.
При идентификации методом планирования эксперимента принимается следующая последовательность операций:
- все члены уравнения модели, содержащие переменные xi их квадраты и произведения записывают в виде линейных уравнений ai xi и нумеруют последовательно при составлении полинома
![]()
или в общем виде

где n - число членов уравнения регрессии; j = 1/N - номер эксперимента;
для определения коэффициентов уравнения ai в соответсвии с методом минимума суммы квадратов отклонений записывают функционал:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем