Программируемый таймер установки для подводного вытяжения позвоночника
1.3 Современные установки для подводного вытяжения позвоночника
Среди изученных в процессе патентного поиска установок, особое внимание заслуживают те установки, которые имеют в своём составе систему управления нагрузкой.[4] Установка (рисунок 1.5) содержит фиксаторы 1 и пояс 2 пациента, трос 3, направляющие ролики 4, рычаг 5, груз 6, установленный на каретке 7 с реве
рсивным приводом, и пульт управления 10. Вдоль рычага 5 установлены герконы, на каретке - постоянный магнит 16, а на пульте управления - переключатели времени изменения нагрузки и ее амплитуды. Оба переключателя включены в цепь управления скоростью привода. Груз соответствует максимальной амплитуде нагрузки. В приводе может быть использован двигатель постоянного тока, либо шаговый двигатель. Установка применяется при вертикальном вытяжении в бассейне, либо при горизонтальном вытяжении в ванне, снабженной щитовым ложем. Установка работает следующим образом: Пациент помещается на основание 26 в ванной 25, на нём закрепляется фиксатор 1 и пояс 2. Медсестра устанавливает Параметры процедуры при помощи переключателей на передней панели. После нажатия кнопки «Пуск» начинается процедура. Устройство управления изменяет нагрузку посредством шагового двигателя 9, редуктора 34, винта 8, перемещает каретку 7 с грузом 6 относительно опоры 35 рычага 5. Положение груза оценивается при помощи герконов 15,14,13,12. Система позволяет без применения датчика усилия достаточно точно устанавливать предварительно рассчитанную величину нагрузки.
Конструкция установки позволяет легко регулировать время нагрузки, её амплитуду, скорость изменения при помощи одного шагового двигателя. На передней панели прибора для управления установкой расположены соответствующие органы управления, которые позволяют выставить время, в течение которого будет происходить изменение нагрузки; время, в течение которого нагрузка остаётся постоянно; амплитуду нагрузки.
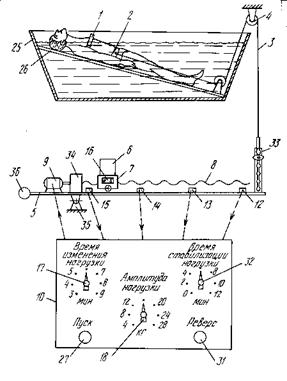
Рисунок. 1.5- Установка для подводного вытяжения позвоночника
Установка (Рисунок.1.6) содержит фиксаторы 1 и пояс 2 пациента, трос 3 с направляющими роликами 4 и блок управления, в который введены присоединенный к тросу 3 датчик усилия 5, программный задатчик 6 с постоянным запоминающим устройством 13, табло и клавиатурой для задания параметров процедуры медсестрой, регулятор нагрузки (выполненный на базе микропроцессора) и пневматический сервомотор с золотником. Датчик усилия и программный задатчик 6 подключены к регулятору 7, выход регулятора связан с золотником сервомотора 8, а к штоку поршня сервомотора присоединен конец троса 3.
Установка имеет микропроцессорное устройство управления величинами нагрузки и временными параметрами, система имеет датчик усилия натяжения при помощи которого в системе осуществляется обратная связь. Устройство усложнено применением пневмопривода.
Установка работает следующим образом: Пациент помещается на основание 31 в ванне 30. На теле пациента закрепляются фиксатор 1 и пояс 2. Медсестра-оператор устанавливает режимы работы установки: Амплитуду нагрузки, скорость изменения нагрузки, время процедуры при помощи клавиш 22, 23, 24, 25. После нажатия кнопки «Пуск» (22) Начинается цикл процедуры. Все параметры процедуры, как при их установке, так и во время процедуры, отображаются на семисегментных индикаторах, причём время до конца процедуры и текущая величина нагрузки отображаются отдельно от установленных оператором величин. Микропроцессорное устройство управляет реле 29 золотника пневмопривода и открывает его в случае, когда необходимо снять нагрузку. Подача нагрузки осуществляется через управляемый устройством управления 7 поршневой цилиндр 9, посредством перемещения штока и подачи тем самым сжатого воздуха в одну из частей рабочего цилиндра 8.
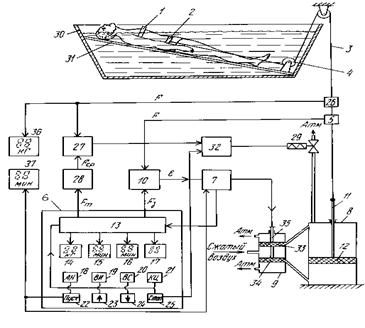
Рисунок 1.6 - Установка для подводного вытяжения позвоночника
Устройство (рисунок 1.7) предназначено для обеспечения равномерного дифференцированного приложения растягивающей силы к позвоночнику при упрощении отпуска процедур и может быть использовано в физиотерапии для профилактики и лечения заболеваний позвоночника при подводном вытяжении. На раме установлен узел фиксации плечевого пояса в виде двух подмышечников на горизонтальных направляющих. Головодержатель размещен на вертикальных направляющих, закрепленных на раме, оснащен противовесом и состоит из двух частей - затылочной и подбородочной. Секторы взаимодействуют с регулировочным винтом, установленным на основание. Подбородочная часть размещена на двух горизонтальных направляющих, закрепленных на затылочной части. Концы опоры подбородка дугообразной формы шарнирно закреплены на подбородочной части, а середина взаимодействует с регулировочным винтом. Механизм нагружения закреплен на раме и выполнен в виде самостопорящейся лебедки с динамометром. Трособлочная система состоит их двух тросов, связанных уравновешивающим блоком, причем один из них прикреплен к самостопорящейся лебедке, а другой проходит через кронштейны с роликами, установленные на раме, и обеими прикреплен к тазовому поясу. Подковообразная накладка затылочной части, накладки опоры подбородка и подмышечников выполнены из эластичного материала, стойкого к воздействию воды и дезинфицирующих растворов, причем опорная поверхность подмышечников выполнена в виде дуги окружности, обращенной вогнутой частью вниз, при этом по середине направляющих узла фиксации плечевого пояса закреплен гидромассажер, выполненный в виде центральной трубы с отходящими от нее в противоположные стороны попарно слепыми патрубками, расположенными перпендикулярно центральной трубе и лежащими с ней в одной плоскости, а тазовый пояс оснащен поплавками. Раздельная фиксация при вытяжении как шейного, так и нижнегрудного и поясничного отделов позвоночника обеспечивает приложение к ним растягивающей силы оптимальной величины.
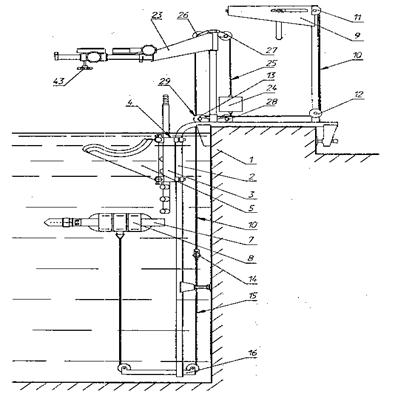
Рисунок 1.7 - Установка для вертикального подводного вытяжения позвоночника.
2. Разработка структурной схемы программируемого таймера для установки подводного вытяжения позвоночника
Система построена на базе однокристальной микроЭВМ МК51. В состав устройства входят датчики, электродвигатели, клапана. Предполагается применение трёх видов датчиков:
- Датчик температуры – предназначен для измерения температуры воды в бассейне для последующего автоматического поддержания её на заданном уровне.
- Датчик усилия – предназначен для измерения усилия растяжения, прикладываемого к пациенту.
- Датчик уровня – предназначен для измерения уровня воды в бассейне
Устройство содержит следующие узлы:
Коммутатор – предназначен для последовательного, разделённого во времени опроса каждого из датчиков и позволяет упростить схему, ограничившись применением одного АЦП.
АЦП – аналагово-цифровой преобразователь, предназначен для преобразования сигнала датчика, в данный промежуток времени подключённого к АЦП через Коммутатор, в цифровой код.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем