Программируемый таймер установки для подводного вытяжения позвоночника
ЖК Модуль – Устройство на жидких кристаллах, отображающее информацию о режимах процедуры.
Дешифратор – предназначен для коммутации устройств, управляемых системой.
К1, К2, К3 – гидроклапаны с электроприводом для регулирования и подачи горячей, холодной воды и слива её из бассейна.
УС – устройство сопряжения, преобразующее цифровой сигнал с контроллера в необходимые управляющие сигна
лы.
Шаговый двигатель – двигатель, привод которого регулирует нагрузку.
Регуляция усилия растяжения, прилагаемого к пациенту осуществляется с помощью шагового двигателя. Включение подачи горячей и холодной воды, а также, слив воды осуществляется гидроклапанами открывание и закрывание которого осуществляется электрическим приводом. В качестве устройства отображения предполагается использование готового ЖК-модуля со встроенным контроллером. Устройство работает следующим образом: при включении установки устройство, снимает показания датчика уровня и если бассейн пуст, то открывает гидроклапаны подачи холодной и горячей воды. Когда уровень воды достигнет датчика температуры, устройство контролирует температуру воды и регулирует её подачу таким образом, чтобы температура сохранялась постоянной заданной заранее (обычно 37°С). При достижении воды уровня наполнения, наполнение прекращается и система переходит в режим поддержания температуры и объёма воды. После закрепления поясов больного оператор выставляет время и режим работы устройства (скорость изменения нагрузки, диапазон нагрузок и т.д.). По окончании процедуры, нагрузка снимается с пациента. Для интерфейса с оператором используется простейшая клавиатура и ЖК-модуль. Удобство интерфейса будет определятся в значительной степени программным обеспечением. Для возможности быстрого изменения конструкции с целью добавления дополнительных датчиков а также средств регулировки воздействия, датчики и потребители подключены при помощи коммутирующих схем на базе дешифраторов.
3 Разработка схемы электрической принципиальной
3.1 Разработка схемы электрической принципиальной программируемого таймера в составе устройства управления тракционной установкой
Подбор электронных компонентов схемы производится, на основе разработанной структурной схемы устройства. Программируемый таймер является неотъемлемой составной частью устройства управления установкой подводного вытяжения позвоночника. В данной главе основное внимание сконцентрировано на разработке цифровой части электрической схемы устройства. Основу устройства управления составляет однокристальная микроЭВМ КР1816ВЕ751, имеющая в своём составе репрограммируемое постоянное запоминающее устройство (ПЗУ).
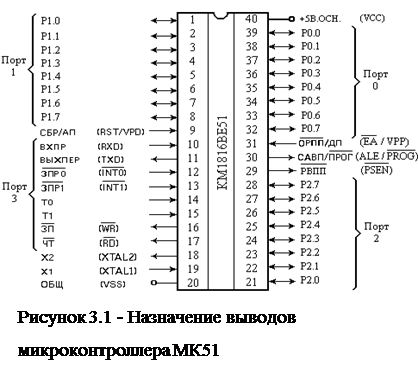
ОМЭВМ, назначение выводов которой представлено на рисунке 3.1 состоит из следующих основных функциональных узлов: блока управления, арифметико-логического устройства, блока таймеров/счетчиков, блока последовательного интерфейса и прерываний, .программного счетчика, памяти данных и памяти программ. Двусторонний обмен информацией между функциональными блоками осуществляется с помощью внутренней 8-разрядной магистрали данных. Разряды порта 3 микроконтроллера имеют двойную функцию, в зависимости от установленных режимов работы. Порт 3 может функционировать как обыкновенный параллельный 8-разрядный интерфейс, либо позволяет организовывать последовательный канал обмена данными и систему прерываний от внешних устройств, причём существует возможность задавать режим работы каждого разряда порта 3 в отдельности.
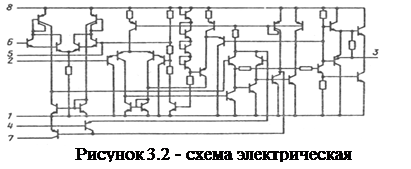
В устройстве управления использована возможность организации обработки прерывания от внешнего устройства для отсчёта секундных интервалов времени, что позволило сэкономить программную память и сосредоточить внимание программы на обработку показаний датчиков и работу с ЖК модулем. Для отсчёта секундных интервалов используется микросхема-таймер КР1008ВИ1 (рисунок 3.2), позволяющая задавать RC-цепочкой временные параметры генерируемого сигнала. Несмотря на отсутствие в схеме таймера кварцевого резонатора, RC-цепочка даёт стабильные колебания с достаточной для отсчёта времени процедуры точностью.
Устройство оснащено датчиками температуры, усилия растяжения, уровня жидкости. В данном проекте не рассматриваются цепи подключения датчиков к аналогово-цифровому преобразователю (АЦП) и
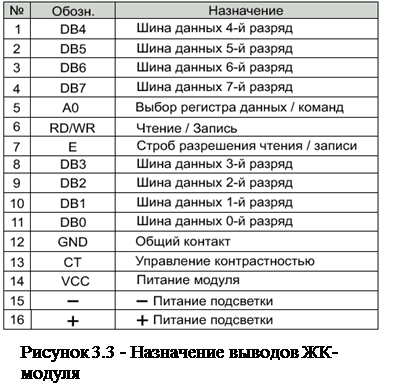
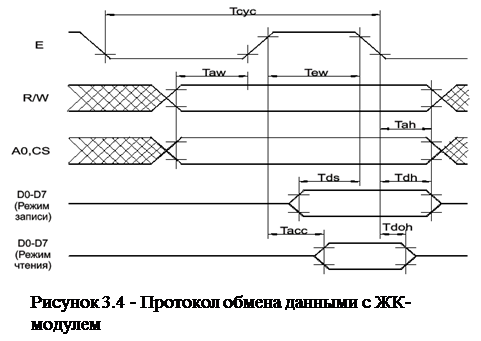
предусилительные схемы, ввиду наличия широкой номенклатуры изготавливаемых сенсоров, в том числе и со встроенными предусилителями сигнала. Схема устройства управления включает в себя систему сбора данных, построенную на одной микросхеме КР572ПВ4. Микросхема имеет 8 аналоговых входов и осуществляет последовательно преобразование по каждому из них. Аналоговый сигнал преобразуется в 8-значное двоичное число. Коэффициент нелинейности не более 0.3% Каждому аналоговому каналу соответствует ячейка оперативной памяти. Считывание данных может происходить асинхронно с получением результатов преобразования. Данный АЦП позволяет «оцифровывать» сигнал с напряжением до 2.5В. На полный цикл преобразования по всем восьми каналам требуется :не более 256 мкс, при тактовой частоте 2.5 Мгц. Ввиду того что в разрабатываемом устройстве нет необходимости в быстроте преобразования, скорость преобразования не имеет особого значения. Тактовым генератором для микросхемы сбора данных является таймер КР1008ВИ1. Для отображения информации применён ЖК-модуль MT-12S2-1 .(LCD) Данное индикаторное устройство позволяет отображать как цифровую так и символьную информацию. Размер экрана 2х12 символов при матрице символа 5х8. ЖК-модуль имеет встроенный контроллер управления экраном, аналогичный SED1520DOA фирмы SEIKO EPSON. Шина данных модуля имеет восемь разрядов. Назначение выводов ЖК-модуля (рисунок 3.3) и протокол обмена данными с ним показаны (рисунок 3.4) будут затронуты подробнее при разработке алгоритма программы.
В состав системы включена клавиатура, состоящая из четырёх клавиш.
Интерфейс с опреатором предполагается организовать в режиме выбора пунктов меню и изменения установленных по умолчанию значений.
 Исполнительная часть схемы состоит из трёх клапанных механизмов, положением клапанов которых управляет электромагнитный привод,
Исполнительная часть схемы состоит из трёх клапанных механизмов, положением клапанов которых управляет электромагнитный привод,
показанный на схеме катушками L1, L2, L3 (рисунок 3.5). Клапанные механизмы предназначены для управления подачей горячей и холодной воды в ванную, а также слива воды после процедуры. Устройство, ввиду того, что имеется датчик температуры, имеет возможность контроля температуры воды и поддержания её постоянной . Датчик уровня позволяет организовать слежение за уровнем воды при наполнении ванны и подачи горячей воды для поддержания постоянной, комфортной для тела температуры.
Для изменения усилия воздействия в системе предусмотрен шаговый двигатель. (M). Задача по формированию управляющих импульсов для шагового двигателя возложена на микроконтроллер, что позволило упростить электрическую схему. Кинематическая схема изменения нагрузки, приведенная на рисунке 1.5 взята за основу, как наиболее простая и эффективная по моему мнению. Для контроля усилия натяжения предусмотрен датчик усилия натяжения, установленный на передающем усилие тросу.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем